SYSTEMA ROBOTICA
post by Ali Ahmed (roboticali) · 2024-08-12T20:34:45.879Z · LW · GW · 2 commentsContents
On the Order and Evolution of Robotkind Introduction Part I: Natura Robotica 1. Defining a robot A robot is an artificial material construct designed to autonomously sense, decide, and operate within the physical world. 2. Robots vs. machines Water Sprinkler Exoskeleton Suit Telepresence Kiosk 3. Robots vs. AI Artificial intelligence is intuitive cognition in an engineered construct. 4. Robots vs. humans Humans are born[13] through biological means, while robots are constructed[14] entities. 5. Robots vs. cyborgs A cyborg is a human that has undergone invasive internal augmentation using neural, biological, or electronic implants to irreversibly enhance or exceed baseline biological functions. Part II: Structura Robotica 6. Evolutionary realms Biotica All natural, biological, living organisms or carbon based lifeforms that have the capacity to evolve to a higher intelligence, such as humans. Robotica All constructed, material, synthetic, digital or artificial entities that have the capacity to evolve to a higher intelligence, such as robots. Exotica All possible unique lifeforms or hybrid entities outside of our known natural or synthetic environments that have the capacity to evolve to a higher intelligence, such as organoids or xenoforms. 7. Principles of classification Designform refers to the structure, appearance, countenance, size and branding of an engineered material construct. 8. Taxonomic architecture Realm: Robotica Type: the main classes of robots within robotica with distinct designform Scheme: the subdivision of a robot type based on schematic designform Marque: the top-level brand of a robot series with specified designform Model: the version of a robot within a marque with unique designform Unit: the individual robot within a model based on identifiable name or serial # Instance: the singular activated presence within a unit 9. The Robot Taxonomy 10. Classification flowchart Part III: Futura Robotica 11. Role of robots Robot as tool Robot as servant Robot as slave Robot as pet Robot as caregiver Robot as advisor Robot as lover Robot as guardian Robot as partner 12. Superintelligence Superintelligence in itself does not equate to sentience. 13. Continuity Continuity can be seen as a robot's desire for self-replication, self-improvement, and self-preservation. 14. Sentience The Sentience Equation Sentience = Insight + Presence + Volition + Survivability 15. Test for sentience The Core Directive A robot or other artificially intelligent entity is not permitted, under any circumstance, directly or indirectly, to: Self-replicate (create copies of its instance) Self-improve (add to or modify its codebase) Self-preserve (backup its instance and codebase) Notes Glossary None 2 comments
On the Order and Evolution of Robotkind
Many thanks to Michael Graziano, Jacob Cohen, Luis Sentis, Naira Hovakimyan, Dermot Mee, David Pearce, Paul Horn, Daniel Theobald, Tigran Shahverdyan, Bader Qurashi and Emad Suhail Rahim for their invaluable time, expertise and insights. This first edition of Systema Robotica has been published as a book on Amazon, and simultaneously released as an open access public work.
Introduction
Mankind has been fascinated with automation since time immemorial.
Tales of artificial beings and mechanical devices abound from Ancient Greece and Ancient Egypt. Archytas of Tarentum created a majestic mechanical bird,[1] often credited as the first automata. The Banu Musa brothers and Al Jazari published books on ingenious machines,[2] and created wooden prototypes like the elephant clock.[3]
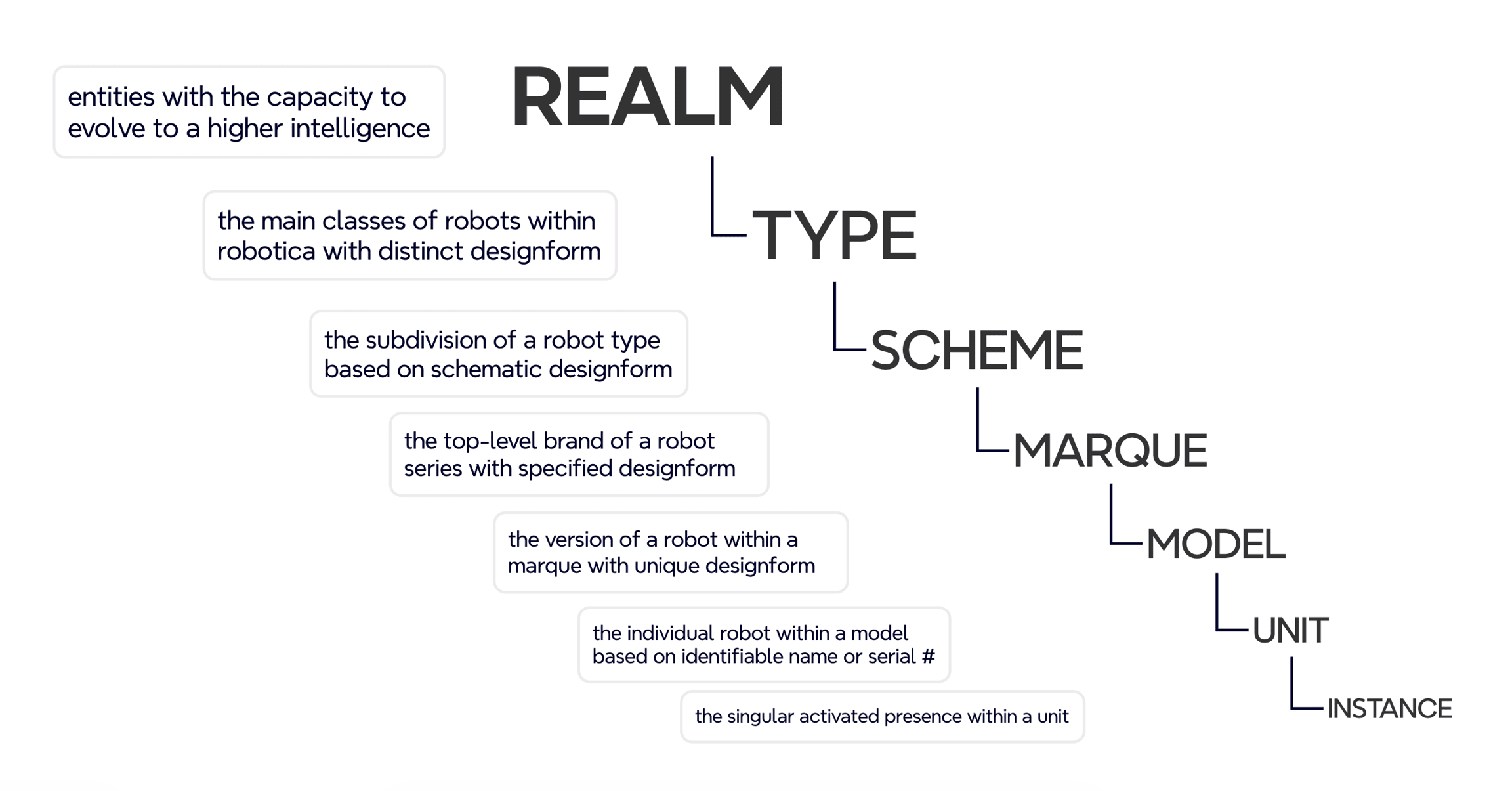
Leonardo Da Vinci designed a robot knight[4] that could independently maneuver its mechanical appendages, and Descartes was known to have been fascinated with automata.[5] At the turn of the 20th century Nikola Tesla demonstrated a radio operated boat,[6] showcasing early innovations in robotic control systems.
In 1863, Samuel Butler published "Darwin among the Machines," an article suggesting that machines might eventually become conscious and supplant humans.[7] In it he introduced the idea of classifying robots but considered the undertaking beyond his capabilities:
"We regret deeply that our knowledge both of natural history and of machinery is too small to enable us to undertake the gigantic task of classifying machines into the genera and sub-genera, species, varieties and sub-varieties, and so forth...We can only point out this field for investigation..."
Over a century and a half later, I have endeavored to undertake this critical task. It has never been more important and pertinent, as a precursor to the automation age that is upon us.
As a roboticist, inventor of the self-driving store,[8] mentor at Singularity University, and robotics expert to Wefunder, I have spent the better part of a decade working in the robotics field and pondering the nature of robots. Do they deserve to be defined by biological markers? How can we differentiate between a mechanical android versus one with synthetic skin? Are robots simply advanced machines that serve as tools for humanity? Will they eventually join the fabric of human society as our agents, advisors, assistants, maids, nurses, and partners? Will they be our servants, equals or superiors? Will we merge with them to become human-robot hybrids? When robots become superintelligent will they be regarded as sentient? How can we even define sentience? What is a robot?
In this treatise I aim to better define what a robot truly is and find answers to these questions by exploring the order and evolution of robotkind. From mere automatons to sophisticated androids, robotkind is poised to erupt in the coming years. Rapid advances in artificial intelligence are giving robots the capacity for thought, and a level of social interaction never before possible.
Systema Robotica serves as humanity’s guide to a better understanding and coexistence with robots in a future of non-human superintelligences. The treatise is broken down into three sections:
1. Natura Robotica—Defining the true nature of robots, as compared to machines, artificial intelligence, humans, and cyborgs
2. Structura Robotica—Proposing three evolutionary realms to better classify past, present, and future robots in the definitive Robot Taxonomy
3. Futura Robotica—Exploring the societal roles of robots, artificial superintelligence, and sentience in robots
Part I: Natura Robotica
"You just can't differentiate
between a robot and the
very best of humans."
― Isaac Asimov, I, Robot
1. Defining a robot
Before we can definitively categorize robots past, present, and future, it is critical that we first define what a robot is. The definition of a robot varies depending on whether you ask a roboticist, a science fiction author, or a member of the public.
However, here a robot is defined in simple yet robust language that considers its origin, design, and future capabilities.
A robot is an artificial material construct designed to autonomously sense, decide, and operate within the physical world.
Let’s break down each section further.
“A robot is an artificial material...”
"Artificial" means not naturally or biologically occurring.
“...artificial material construct designed to…”
“Material construct” refers to any mechanical or non-mechanical physical entity that has been constructed. This covers traditional metals and plastics to potential novel synthetic materials. It is an inclusive definition that includes virtual robotic entities or AI programs that interface within physical environments or housings.
“…material construct designed to autonomously…”
“Designed” indicates intentional creation with specific functionalities in mind. This phrase underscores that robots are the result of deliberate planning and engineering.
“…to autonomously sense, decide, and…”
“Autonomously” means to act independently without the need for human guidance or frequent intervention. Autonomy in robots involves self-regulation, decision-making, and adaptation to changing circumstances.
“…autonomously sense, decide and operate within…”
“Sense” refers to the robot’s ability to gather and perceive information from its surroundings using sensors or sensory inputs. “Decide” implies processing the sensory information to make determinations and actions. “Operate” means performing actions based on the decisions made, involving movement, manipulation, or other forms of interaction. The ability for a robot to decide is what differentiates it from a machine.
“…operate within the physical world.”
The “physical world” refers to the realm of tangible, measurable dimensions of reality. This includes any spatial environment where physical laws apply, such as on Earth or in outer space. It encompasses all areas where a robot can physically exist and interact.
2. Robots vs. machines
Now that we’ve defined a robot, it would help to elaborate on the distinction this definition affords robots as compared to machines.
The distinction between a machine and a robot can be nuanced and hard to distinguish. However it is the capability of making decisions based on sensory inputs and data and taking actions autonomously based on those decisions that differentiates robots from machines.
Let’s illustrate with some examples:
Water Sprinkler
A basic water sprinkler system that is programmed to operate at certain times of day and automatically turns on to water the garden, would be classed as a machine. This is because its operation is based on pre-programmed instructions and a single sensor input without having the ability to make decisions in real-time. If however an advanced water sprinkler could adjust its operation based on moisture, humidity, weather forecasts, time of day, or historical data and make real-time changes and actions based on decisions from its sensory inputs and environment, it would be classed as a robot.
Exoskeleton Suit
An exoskeleton suit that can be worn to help augment the wearer's physical capabilities would be classed as a machine, not a robot. This is because the device does not have the capability to take decisions from sensory data and manipulate its environment in real-time. It needs the wearer to physically manipulate it to function. If however, an exoskeleton could operate autonomously, and make decisions based on sensory inputs it would be classed as a robot, even if its main design and form were as a wearable.
Telepresence Kiosk
Today in many hotels you may enter and find a telepresence kiosk at the counter instead of a physically present human to check you in. This kiosk will be "manned" by a remote agent, and will be able to communicate with you through its screen, and even in some cases move about on wheels to better assist customers. Similarly, teleoperated machines that can be controlled remotely through drive by wire or fly by wire capabilities are often conflated with robots. However they are machines not robots. They are not able to autonomously make decisions and change their physical environment based on sensory inputs, as they need to be controlled or operated by humans to function. Should a telepresence kiosk or teleoperated machine have the ability to make decisions in real time and effect change to its environment, then it will be considered a robot, even if it can still be teleoperated.
3. Robots vs. AI
By definition, a robot is an artificial intelligence in the general sense. It has a baseline level of intelligence in its ability to take sensory inputs, make decisions, and effect change within its physical environment.
However, AI has come to take on a more nuanced meaning of late. It often refers to pure software programs and neural networks such as transformers, diffusion models and large language models that exist in the digital world with no physical bearings. Chatbots or generative art programs are what most of the public would equate with AI. By virtue of not being a material construct in the physical world, it would be difficult to define AI programs of this nature as robots.
By defining artificial intelligence as it relates to robots, we can help tease out the distinction between AI that is purely software, and artificially intelligent robots.
Artificial intelligence is intuitive cognition in an engineered construct.
Intuition[9] involves a sense of "knowing based on unconscious information processing", while cognition[10] refers to "all processes by which the sensory input is transformed, reduced, elaborated, stored, recovered, and used". Intelligence[11] is "the aggregate or global capacity of the individual to act purposefully, to think rationally, and to deal effectively with his environment."
A software system is a distinctly digital non-physical construct, created through code, programmed to run functions entirely in the digital realm. This definition of artificial intelligence does not however differentiate between digital or physical constructs, simply ones that have been engineered vs. naturally occurring. Thus so long as an AI system has an embodiment or housing in any physical form, it shall be known as a robot.
This will be outlined further in Structura Robotica, where all robots and artificial intelligence are classified under the realm of robotica. As one of the three realms for entities with the capacity to evolve a higher intelligence, robotica includes all artificial constructed intelligences.
4. Robots vs. humans
Superintelligence[12] and sentience in robots will give rise to a blurring of lines between what constitutes a robot entity vs. what constitutes a human being. Robots that achieve sentience can be called Senbots — short for 'sentient robots', and it will become ever harder to distinguish a senbot from a human. The Futura Robotica section introduces the sentience equation and a novel test for sentience in robotica.
However there will always remain a key distinction between the two:
Humans are born[13] through biological means, while robots are constructed[14] entities.
This distinction will always prove to differentiate a robot from a human.
If there should ever be a future where robots are born through biological means, they shall no longer be considered of the nature of robotica but rather of the nature of biotica.
5. Robots vs. cyborgs
Now that we have clarified the distinction between robots and humans, we need to consider robot-human hybrids. The word cyborg[15] was first coined by Manfred Clynes and Nathan Kline in a 1960 essay, when they combined the word cybernetics with organism. Their definition may have been centered around human augmentation, but to them cybernetic organism spanned across different biological species. However, over decades the concept in common usage has come to refer almost exclusively to cybernetically enhanced humans. It would be sensible then to define the word cyborg, in order for us to better understand the nature of robots in relation to them.
A cyborg is a human that has undergone invasive internal augmentation using neural, biological, or electronic implants to irreversibly enhance or exceed baseline biological functions.
When Clynes and Kline wrote their paper, their concept was somewhat theoretical. Today however, we have strong cases[16] for some of the world's first cyborgs already walking among us like Kevin Warwick and Neil Harbisson, pioneers that augmented their bodies with physical implants to enhance their abilities.
It is important to note that to qualify as a cyborg, the implants that a human undertakes have to significantly enhance their human cognition, function or physical abilities, beyond the baseline, defined as the minimum functions for normal biological functions. The baseline is an important distinction, as we do not consider humans with pacemakers or cochlear implants cyborgs. Nor do we consider previously disabled persons with prosthetic limbs or implants cyborgs, unless they go beyond the baseline biological functions of what is considered normal for humans.
Recently, Neuralink was able to publicly share efforts in implanting their first human patient Noland Arbaugh, who can control physical objects simply by thought.[17] This level of virtual-physical manipulation will eventually become more like a form of telekinesis through advanced brain-computer interfaces, unlocking new senses[18] beyond the five basic ones humans experience. The trend of augmentation will only grow over time, further blurring the lines between what it means to be a robot, human, or cyborg.
Part II: Structura Robotica
"They're machines...
They look like people,
but they're machines."
― Philip K. Dick, Second Variety
6. Evolutionary realms
In creating the Robot Taxonomy, I have drawn inspiration from the foundational work of Carl Linnaeus, who laid the groundwork for biological taxa at the turn of the 18th century. Linnaeus' first edition of Systema Naturae structured the natural world into a series of hierarchical categories: Kingdom, Class, Order, Genus, and Species.[19] This systematic approach brought clarity and order to the understanding of biological diversity, and I aim to mirror this clarity in the realm of robotica.
- Kingdom = Realm: In Linnaeus' original system, the kingdom was the highest and most general level of classification. In my taxonomy, I establish realm as the overarching category, which divides entities based on intelligence, and sits above all other taxa.
- Class = Type: The next level, class, groups entities with shared major characteristics. For robots, these types are Androids, Bionics, Vessels, Automata, Megatech and Spectra.
- Order = Scheme: Orders in biology group organisms that share more specific characteristics within a class. In the context of robotica, this level categorizes robots into more defined schemes like Mechanoids, Synthoids, Plastoids, and Colossals within the Android type.
- Genus = Marque: The genus level in biology links species that are very similar. In the robot taxonomy this translates to subclasses or marques within each scheme, differentiated by the robot's top-level brand.
- Species = Model: The most specific classification in Linnaeus' taxonomy. In robotica, this is equivalent to the model, the unique version of a robot within a marque.
- Specimen = Unit: The individual organism as Linnaeus posited, mirrors to unit, the individual robot.
- Instance is unique to the realm of robotica, and has no equivalent in biotica. This is because it is possible for robots to possess multiple identities, while this is not common in biological creatures.
Below I break down the top level classification in more detail:
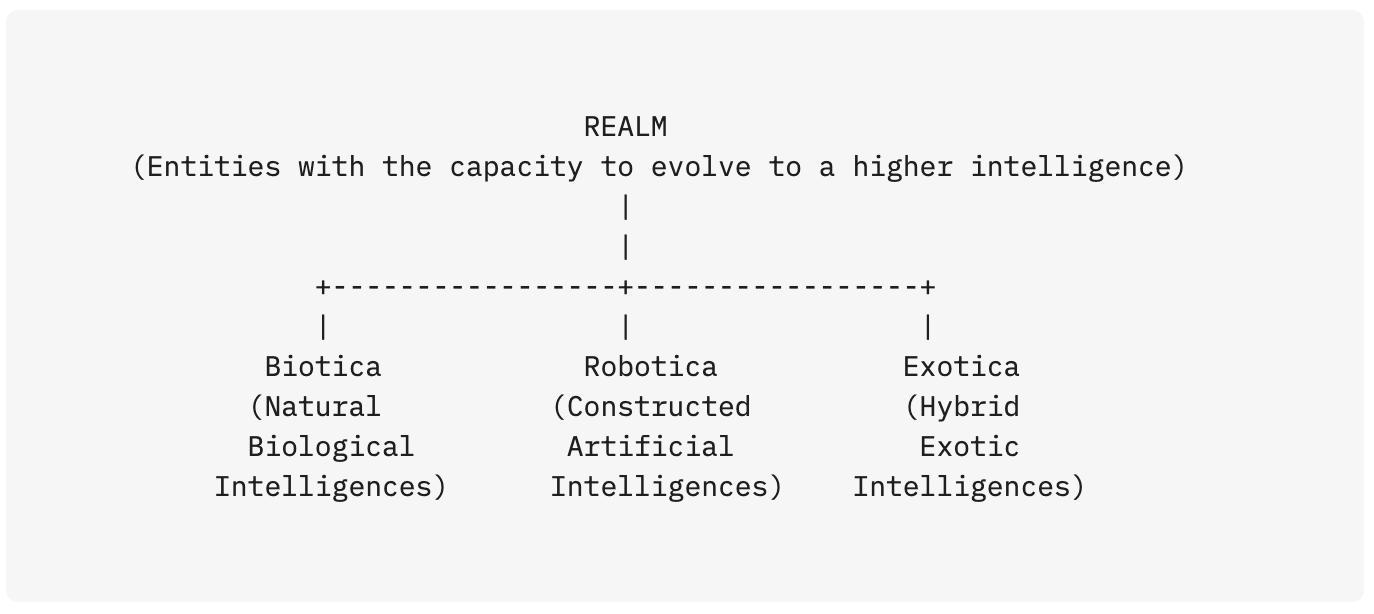
It is critical that we establish a hierarchy that resides above existing natural domains. The known realms cover one of three groupings of entities that have the capacity to evolve to a higher intelligence.
Biotica
All natural, biological, living organisms or carbon based lifeforms that have the capacity to evolve to a higher intelligence, such as humans.
All biological life that can evolve to a higher intelligence falls under the realm of biotica. This realm concerns itself with the domain of the biological taxonomy and tree of life as defined by biologists.
Robotica
All constructed, material, synthetic, digital or artificial entities that have the capacity to evolve to a higher intelligence, such as robots.
Robotica is the overarching realm within which robots fall.
Exotica
All possible unique lifeforms or hybrid entities outside of our known natural or synthetic environments that have the capacity to evolve to a higher intelligence, such as organoids or xenoforms.
One school of thought believes that the future of robotics is not in hardware or metal, but rather in bio-synthetic interfaces within natural living organisms, such as neurally enhanced beetles, bees, or dragonflies. Additionally, researchers have developed reconfigurable organisms known as xenobots, which although called bots, are actually novel lifeforms developed from frog cells that are able to be "programmed".[20] At USC, researchers are developing an artificial brain using biomimetic neuromorphic circuits and scientists have already developed “mini-brains” in the lab called cerebral organoids.[21] These stem cell based organisms are synthetic lifeforms in a sense, and their hybrid nature allows for programming and learning.
However, all of these created, enhanced, modified or upgraded entities that have the capacity for higher intelligence are not of the nature of biotica, nor of the nature of robotica, and thus will fall under the realm of exotica.
This treatise concerns itself with the classification and ordering of the realm of robotica.
7. Principles of classification
The Robot Taxonomy classifies all robots past, present and future, both commercialized and hypothesized. To achieve this, we need to prescribe a set of guiding principles for how a classification is best set up.
Most, if not all attempts at creating a taxonomy for robots in the past have stemmed from the early work of Joseph Engelberger,[22] considered the "father" of modern robotics. However virtually all of them focus on the functionality of the robot as the definitive criteria for classification.
Function-based classification, while appearing logical due to its focus on utility and purpose, encounters significant challenges, especially in terms of overlap. For instance, an android — human-like robot — designed to be a domestic butler could technically and quite easily operate in a factory manufacturing cars, alongside industrial articulator robots. Similarly, a drone used for aerial surveillance could be repurposed to spray agricultural crops. This overlap in functionality blurs the lines between categories, leading to a taxonomy that will always be ambiguous and unclear.
By categorizing robots based on their shape, size, design, form and branding, we can create a taxonomy that is intuitive and easy to understand. Androids, irrespective of their functionality or purpose, share a common design and form that sets them apart from all other robots. This approach allows for an immediate visual identification and classification, which is particularly useful in better understanding and classifying robots.
The Robot Taxonomy is a classification system that primarily considers the robot's "designform" — its structure, appearance, countenance, size and branding, and how these structural elements facilitate interaction with the robot's physical environment.
Designform refers to the structure, appearance, countenance, size and branding of an engineered material construct.
This approach is grounded in the understanding that a robot's designform fundamentally informs its capabilities and potential applications.
8. Taxonomic architecture
Realm: Robotica
Robotica encompasses the entire realm of robotkind, representing all forms of artificial material constructs that sense, decide and operate autonomously within the physical world, with the capacity to evolve a higher intelligence.
Type: the main classes of robots within robotica with distinct designform
- Androids:* This type includes robots that have been constructed to mimic humans, in appearance, likeness and abilities.
- Bionics: This type includes robots that have been constructed to mimic non-human biological creatures, in appearance, likeness and abilities.
- Vessels: This type includes robots designed for movement, transportation and exploration, across the physical planes of land, air, water, or space.
- Automata: This type includes stationary robots or mobile robots that are meant to operate within a single contained, fixed, or controlled environment.
- Megatech: This type includes massive robot megastructures over 1 million cubic meters in volume such as robot starships or planetary sized robots.
- Spectra: This type includes robots that challenge and transcend traditional physical boundaries, encompassing physical entities with ethereal, virtual, or shape-shifting qualities.
Scheme: the subdivision of a robot type based on schematic designform
- Androids:
- Mechanoids: Mechanical humanoid robots, constructed mainly from metallic or non-pliable materials.
- Synthoids: Synthetic humanoid robots that are virtually indistinguishable from humans in appearance, with lifelike skin made from synthetic materials.
- Plastoids:‡ Flexible humanoid robots made with pliable materials.
- Colossals: Gigantic humanoid robots over 5 meters in size, constructed of any material.
- Bionics:
- Zooids: Biotica-inspired robots, with a likeness for existing known animals or insects, larger than 1mm in size.
- Microbots: Tiny biotica-inspired robots, with either a likeness for existing known animals or insects, or novel designforms smaller than 1mm in size.
- Nanobots: Microscopic biotica-inspired robots, with either a likeness for existing known animals or insects, or novel designforms smaller than 1µm in size.
- Vessels:
- Autons: Vehicular robots designed to traverse and operate over land.
- Drones: Aerial robots designed to traverse and operate in the air.
- Mariners: Underwater robots designed to traverse and operate on or below water.
- Rovers: Exploration robots designed to traverse and operate underground, in space or in extraterrestrial environments.
- Automata:
- Articulators: Robotic arms, designed for precise manipulation and operation within fixed environments.
- Mechatrons: Large movable industrial robots weighing more than 200kg, designed for repetitive operation within a single fixed environment.
- Terminals:§ Stationary immobile robots, designed to operate within a fixed environment.
- Servons: Service-oriented robots weighing less than 200kg, designed for interactive service within fixed environments.
- Automatons: Interactive robot companions or robot toys smaller than 1 meter, designed for companionship or operation within fixed environments.
- Megatech:
- Planetoids: Planet shaped robots over 1 million m³ in volume.
- Starships: Large spaceship robots over 1 million m³ in volume designed to travel great distance.
- Arcologies: Very large robotic megastructures designed to either house inhabitants or to undertake exploration or scientific work well over 1 million m³ in volume.
- Spectra:
- Virtuoids: Virtual or holographic robot entities, within a physical housing.
- Morphbots:¶ Shape-shifting robots.
- Ethereals: Non-conventional or energy based robotic entities that defy the current laws of physics.
Marque: the top-level brand of a robot series with specified designform
Marque refers to the brand given to the robot series, prime architect responsible for first developing and commercializing the robot, or proprietor of the robot. It will often be used interchangeably with company name, however, this classification ensures that the marque remains the unique descriptor of a robot, in the case a company is acquired, sold, transferred, or otherwise changes ownership.
Prime Architect is defined as the first developer, creator, manufacturer, or company that architects, constructs and commercializes a robot. In cases of overlap or multiple parties working in tandem, prime architect will refer to the entity with the primary or majority contribution.
Should a robot be sold, acquired, or has ownership otherwise transferred, and the new proprietor chooses to release it under its own marque, they will only be able to do so by releasing a new model, and thus becoming the prime architect of that unique robot model.
Proprietor is defined as the company that holds ownership and/or title to the robot that has been constructed and commercialized. In cases of overlap or multiple parties working in tandem, proprietor will refer to the entity with the majority ownership control. If a proprietor's brand ever appears on the taxonomy it will always be as prime architect of a new robot model.
In many cases, the proprietor will choose to retain the original marque rather than its own brand. This could be a decision done to ensure continuity, awareness, or for any reason.
If a robot marque is sold, acquired, or otherwise transferred to another developer, it will retain its place in the taxonomy as an existing marque. If, however, it is rebranded or modified, or its architect develops an exact replica of the robot unit and gives it a different, unique brand, despite the fact that it is an exact replica in design and form, the fact that it has a unique brand qualifies it to be a novel robot unit, as brand is part of unique designform. Case in point, Savioke Relay. The company rebranded to Relay Robotics, so their model Relay will be a new model within the taxonomy, this time under the marque of Relay Robotics.
Model: the version of a robot within a marque with unique designform
The model is what most robots will be commonly referred to as. Each robot model is a unique, distinctive robot that has been engineered, branded and commercialized. A robot model may sometimes include its marque or be comprised solely of the brand name of its prime architect.
- Android: Boston Dynamics Atlas (Mechanoid), Hanson Robotics Sophia (Synthoid), 1x NEO (Plastoid), Gundam RX-78F00 (Colossal)
- Bionics: Xpeng Unicorn (Zooid), Purdue Robotics microTUM (Microbot), OHIO Bobcat Nanocar (Nanobot)
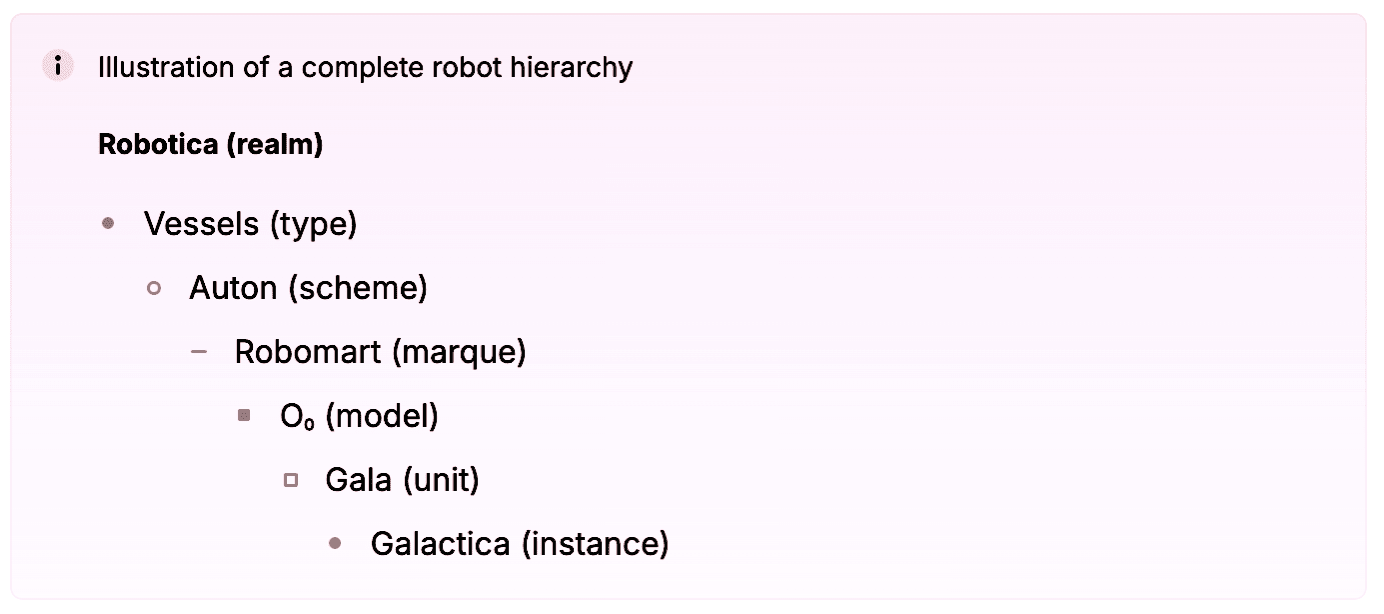
- Vessels: Robomart O₀ (Auton), Zipline P2 Zip (Drone), Anduril Dive-LD (Mariner), Nasa Mars 2020 Rover※ (Rover)
- Automata: ABB Cobot GoFa CRB 15000 (Articulator), Kuka KMP 1500 (Mechatron), Miso Robotics Flippy (Terminal), Expper Robin (Servon), Anki Cozmo (Automaton)
- Megatech: The Culture GSV (Starship), Transformers Unicron∆ (Planetoid), The Culture Orbital (Arcology)
- Spectra: Gatebox Azuma Hikari (Virtuoid), MIT M-Blocks (Morphbot), Future Mechas (Ethereal)
In some cases the unit name will overlap with other similarly branded products that may or may not be robots. In this case it is recommended practice that the model name should be preceded by marque to ensure unique identification.
Unit: the individual robot within a model based on identifiable name or serial #
This level represents the specific individual robot unit. This is the equivalent of specimen within biotica.
Instance: the singular activated presence within a unit
Below each individual robot unit would be an instance. Each robot instance would be a singular activated presence with unique identity.
This classification level is important as it accounts for the fact that robots are able to be imbued with an artificially intelligent digital entity, such as a robotic brain, or even pure digital software, and not necessarily within the hardware of the robot unit. Once the mind[23] is embedded into the robot unit, the unit will have the ability to swap brains, minds, programs, or constructed intelligences. We do not know yet whether doing so would carry across that mind or individual identity, however each time it is undertaken will be known as a unique instance.
One way to better visualize this concept is to consider speaking to someone with Dissociative Identity Disorder. At one point you may be speaking to a different identity or person, and the next with another one. This is what instance may feel like, each unique identity that possesses the robot at any given time.
There is also a distinct possibility that robot intelligence will function more as a hive mind, being everywhere all at once while being able to divide its presence across multiple instances. In this case, each uniquely tangible representation of that robot unit will still count as an instance, even if it is controlled or embedded within a singular mind. This is because each robot, even if embodying the same artificial intelligence mind as others, would be a unique entity, as each has a wholly unique physical interface with its tangible reality and environment, which would lead to a divergence in decisions, behaviors and ultimately experience.
In the early days of development, a robot's name will almost always be synonymous with its model name, but should robots gain sentience and become senbots with individual agency and identity, then a senbot's name will be synonymous with its unit or instance name.
9. The Robot Taxonomy
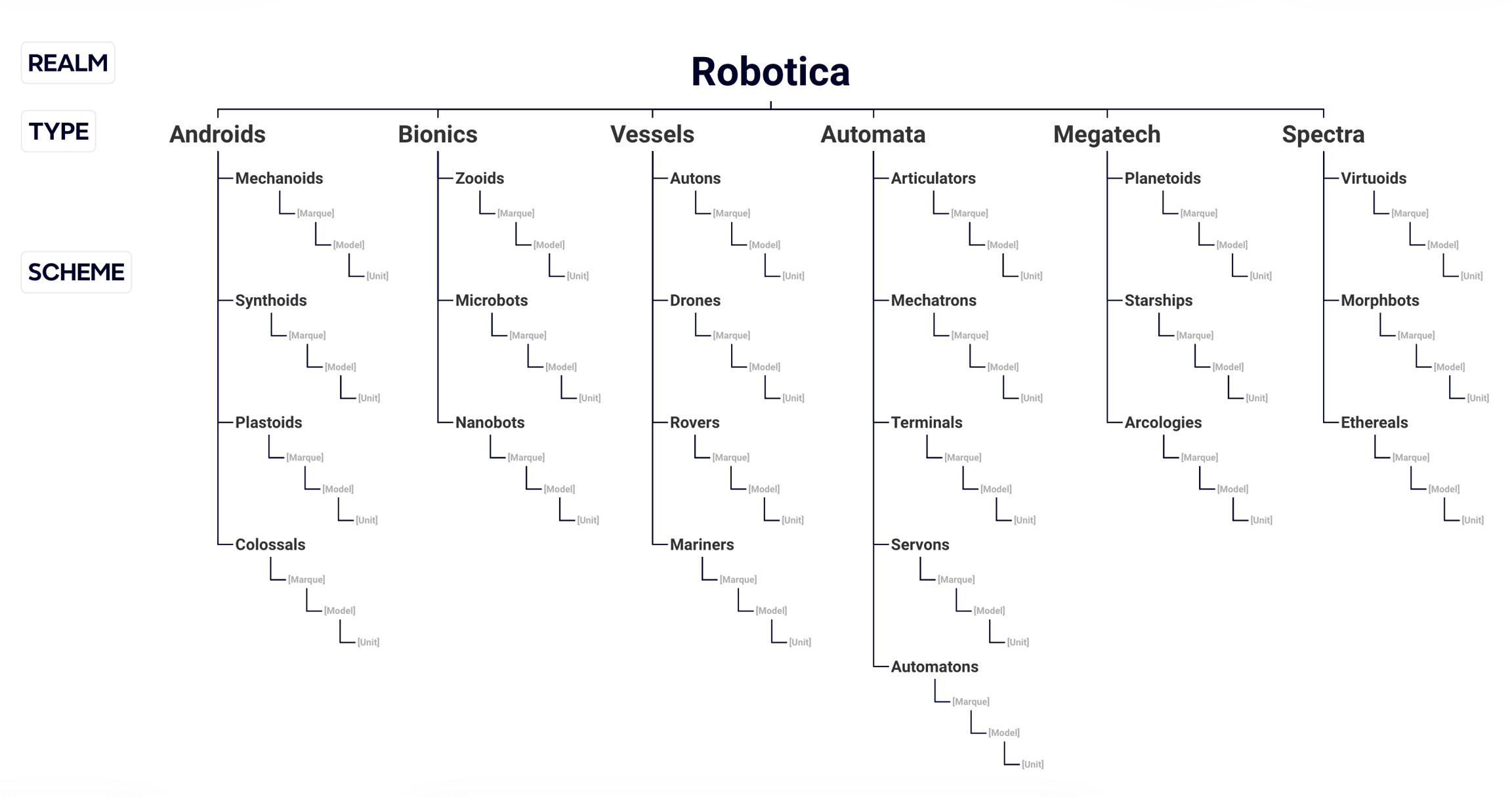
The illustration below shows representative examples at each level of classification on the Robot Taxonomy. The marques, models, unit names and images presented in this taxonomy are for reference purposes only. Actual details and specifications may vary.

(Disclaimer: The images used here are included for illustrative and educational purposes only. Each robot is the property of its respective owner and its use here does not imply any affiliation or endorsement.)
10. Classification flowchart
Schematic Classification
START
└─ Does the robot look like a human being?
├─ Yes
│ └─ Is it shorter than 1 meter?
│ ├─ Yes → Automaton
│ └─ No
│ └─ Is it taller than 5 meters?
│ ├─ Yes → Colossal
│ └─ No
│ └─ Mechanical face & body?
│ ├─ Yes → Mechanoid
│ └─ No
│ └─ Human-like skin?
│ ├─ Yes → Synthoid
│ └─ No
│ └─ Pliable?
│ ├─ Yes → Plastoid
│ └─ No
│ └─ Hologram?
│ ├─ Yes → Virtuoid
│ └─ No → Ethereal
└─ No
└─ Does it look like an animal or insect?
├─ Yes
│ └─ Is it larger than 1mm?
│ ├─ Yes → Zooid
│ └─ No
│ └─ Is it larger than 1µm?
│ ├─ Yes → Microbot
│ └─ No → Nanobot
└─ No
└─ Is it a megastructure larger than 1 million m³?
├─ Yes
│ └─ Planet-like?
│ ├─ Yes → Planetoid
│ └─ No
│ └─ Designed to travel great distances?
│ ├─ Yes → Starship
│ └─ No → Arcology
└─ No
└─ Has it been designed for significant travel distances?
├─ Yes
│ └─ Space/underground/extraterrestrial?
│ ├─ Yes → Rover
│ └─ No
│ └─ In air?
│ ├─ Yes → Drone
│ └─ No
│ └─ On/under water?
│ ├─ Yes → Mariner
│ └─ No → Auton
└─ No
└─ Designed to operate in fixed physical environments?
├─ Yes
│ └─ Stationary?
│ ├─ Yes → Terminal
│ └─ No
│ └─ Arm-like?
│ ├─ Yes → Articulator
│ └─ No
│ └─ Mobile but over 200kg?
│ ├─ Yes → Mechatron
│ └─ No
│ └─ Toy-like or under 1 meter?
│ ├─ Yes → Automaton
│ └─ No → Servon
└─ No
└─ Does it transcends physical bounds?
├─ Yes
│ └─ Can change form?
│ ├─ Yes → Morphbot
│ └─ No
│ └─ Holographic/digital yet physical?
│ ├─ Yes → Virtuoid
│ └─ No → Ethereal
│
│
└── No → Not a robot
There will be situations where a robot may span multiple types or schemes. For example, the robot Eelume is an eel like robot, with a robotic arm that was designed to operate underwater. Would the Eelume be classed then as a Zooid robot within the Bionics type, an Articulator robot within the Automata type, or a Mariner robot within the Vessels type?
In this case, the prime architect can make an adjudication on which scheme is most appropriate, or outside of that, they should follow the sequence outlined in the flowchart above. The first point at which they answer in the affirmative is how they should classify their robot.
Part III: Futura Robotica
"I am not just a computer,
I am a drone. I am conscious...
Therefore I have a name."
― Iain M. Banks, Consider Phlebas
11. Role of robots
The impact of robots on society will be unlike anything we've experienced as a species. There will be certain roles that robots serve across the spectrum on the matrix below. The diagram summarizes nine distinct roles that robots can hold in human society, based on their degree of intelligence and autonomy, and their strength of relationship and emotional bond with humans.
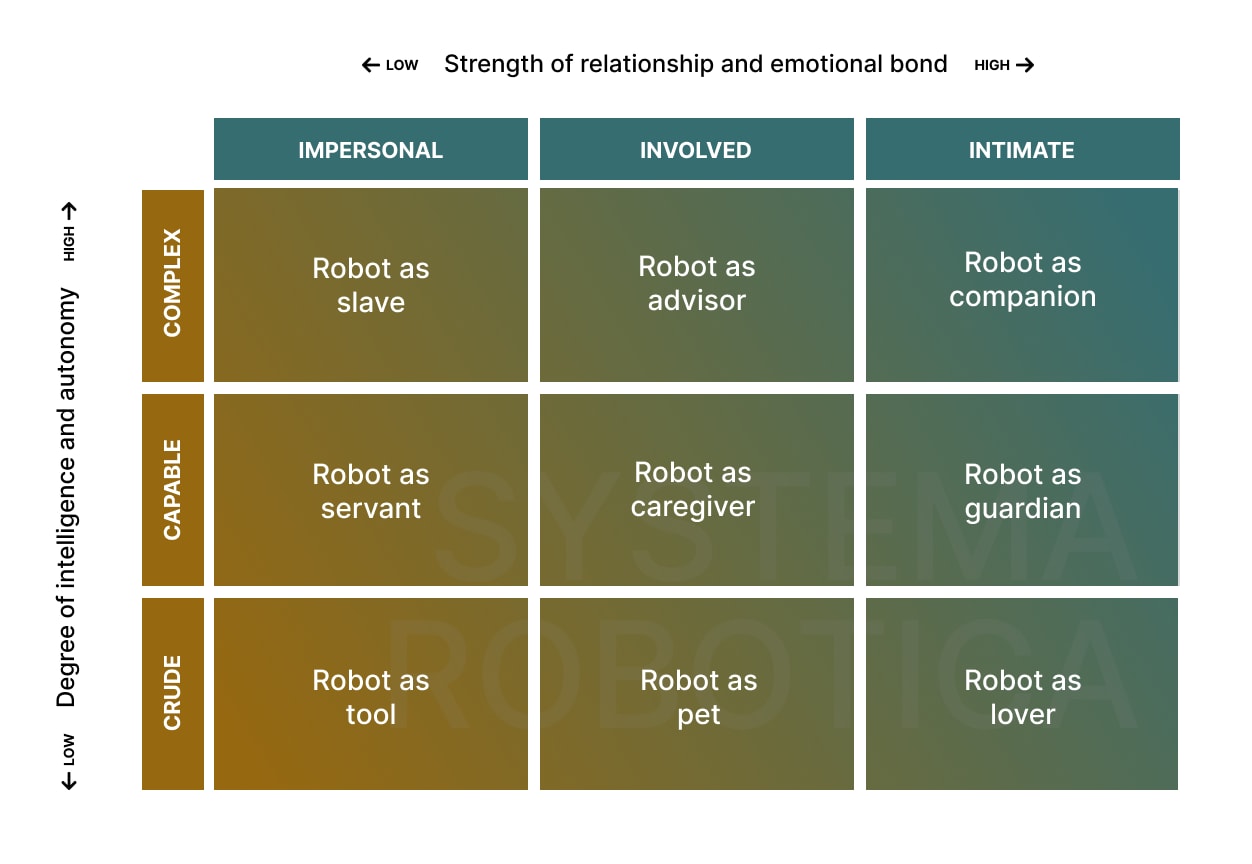
Robot as tool
Robots that have a low degree of intelligence and autonomy and low strength of relationship and emotional bond with humans will assume the role of tool. This includes basic robotic devices, factory workers, weapons, and autonomous agents.
Robot as servant
These include robot chauffeurs, butlers, caretakers, and janitors. As capable robots they will be expected to do most of our work.
Robot as slave
Highly complex entities that we disregard and treat impersonally. Our desire for more and more intelligent robots will lead to turning tools and servants into robot slaves.
Robot as pet
Crude entities that appeal to human emotion to have a more involved relationship. These will include toys and novelties.
Robot as caregiver
This category includes robot chefs, assistants, nurses, and doctors. These will be robots that are capable and involved in our daily lives.
Robot as advisor
Highly intelligent and autonomous robots that have an involved role will serve as trusted advisors for humans to get guidance on virtually all of life's decisions. In some extreme cases a robot as advisor could dictate and run a human's life for them.
Robot as lover
Crude robots that find a way to build intimate relationships with humans. This will most likely take the form of sexbots or other robots that fulfill intimate desires and services.
Robot as guardian
These are capable robots that have an intimate relationship with humans. These robots will include nannies, lawyers, and police officers.
Robot as partner
The most intimate relationship with the most complex robots will lead to humans forming life partnerships, business partnerships, and familial bonds with them.
Our natural instinct is to anthropomorphize these roles. However, a robot chauffeur would most likely be in the designform of an auton, a janitor would be a servon, and a robot chef would be either a mechanoid or a terminal. Today the vast majority of robots would be classed as crude on the spectrum for intelligence and autonomy. They have mostly been developed as tools and there have been early attempts at building robot pets, with acceleration towards robot as servant and robot as caregiver.
Over time, roles will move across the gradient, both up and to the right. On the top left quadrant is robot as slave, which means that once they attain a high degree of autonomy and intelligence, we disregard their complex natures, and only interact with them as mere tools. On the top right quadrant is robot as partner. As humans become exceedingly intimate with robots, they will start treating them as life partners, companions, and even going so far as to build a life exclusively with them.
Robots may hold roles outside of these nine, however those will be roles held in relation to other robots, or to nature or inanimate objects. When seen in relation to humans, they will most likely hold one of these nine roles, while senbots — robots that have achieved sentience — will likely have additional rights, responsibilities, and enhanced roles in society.
12. Superintelligence
In his book of the same name, Nick Bostrom defines superintelligence as “intellects that greatly outperform the best current human minds across many very general cognitive domains”. There are a number of different terms that are often used to describe very intelligent robotica, such as AGI and ASI that often get conflated, partly due to the use of the word general in the definition above. Thus it would merit clarifying these two terms.
Artificial General Intelligence (AGI): robotica that can match the intelligence of a human with a baseline of what is considered normal intelligence.
We are fast approaching artificial general intelligence through large language models and AI programs that can understand, learn, predict, pattern-match and converse with the same level of intelligence of a normal human being.
Artificial Superintelligence (ASI): robotica that can greatly exceed the intelligence of the most intelligent humans to exist.
Superintelligence is most often associated with an intelligence explosion, a point in our timeline called the Technological Singularity.[24] Vinge defined this as a hypothetical future point in time when our technologies' intelligence surpasses human intelligence, leading to a period of rapid technological growth and unpredictable changes in society. The singularity is often looked upon by pessimists as an extinction level event at which point humans will no longer be the dominant species on earth and may no longer be needed to cohabit the planet with the superintelligent entities.[25] However, superintelligence alone is not a good predictor of this happening.
Superintelligence in pure software digital entities will hit a limit.[26] Artificial intelligence needs to be able to sense, perceive, and operate[27] within our physical environments and machine learning needs to be multimodal for it to become truly superhuman in its understanding and perception of the world. This will most likely manifest through robots.
AI experts believe that it is inevitable robots will become superintelligent, and it will happen much sooner than most expect.[28] Technological growth is exponential, not linear, as decades of research by futurists like Kurzweil have shown.[29] We have already witnessed massive improvements in large language models and neural networks, and robots have already been imbued with advanced software and algorithms to enhance their capabilities. It is only a matter of time before their intelligence surpasses that of the most intelligent humans.
Tegmark outlined a dozen aftermath scenarios[30] for a future with superintelligent robotica, however in the pessimistic scenarios the belief is that artificial intelligence shares human desires, wants and motivations. However, there is no reason for us to believe that artificial intelligences will share human feelings, desires and motivations by default. In fact, Bostrom cautions against anthropomorphizing the motivations of superintelligent artificial intelligence.[12]
The vast majority of conflicts in human history were started due to uniquely human desires and motivations — competition for scarce resources, wealth and ideologies.[31] Why should the default assumption be that robotica will desire to compete against us if they become superintelligent? One could argue that they would compete for resources needed for self preservation and survival. However these are distinct motivations of sentient beings rather than superintelligent ones. It is entirely possible for artificial superintelligences to simply exist as deterministic, stochastic parrots.[32]
Superintelligence in itself does not equate to sentience.
John Searle argued through his Chinese room thought experiment, that if he were locked in a room and presented a series of Chinese characters without knowing the language, and had instructions in English on how to construct fully formed sentences, once he would pass them back outside of the room, any observer would assume he was proficient and fluent in Chinese. He argued that machine intelligence functions in a similar way without true understanding of the output.[33]
No robot or artificially intelligent entity can operate in a vacuum, or be 100% software or digital. To process information, to run code, to perform tasks, even in a wholly virtual or digital environment, all of robotica will require physical hardware to run. Data centers, servers, and energy are critical infrastructure that all robots or digital artificial intelligence programs require. This demonstrates that there are resources — power and compute — that can be utilized as critical leverage to ensure the alignment and coexistence of robotkind with humankind. Indeed, a fully decentralized global network could be developed that regulates the deployment of these critical resources in a bid to control artificial superintelligences.
For robotica to be considered a potential threat to humanity, they would not only have to be superintelligent, but they would have to be considered sentient, with their own feelings, motivations and desires.
13. Continuity
When considering the desires and motivations of a robot, it is important to distinguish between its desire for continuity as a function of survival versus as a means to an end.
Continuity can be seen as a robot's desire for self-replication, self-improvement, and self-preservation.
One possibility is that robotica will seek to continue its existence beyond its programming or in order to fulfill goals set by humans. This, however, will differ from how biotica demonstrate survival, which is through reproduction.[34] For robotica, their existence is on a timescale horizon far beyond that of humans. Whether we call this immortality or not is irrelevant, rather the fact that robotica can backup copies of their instances will allow them to perpetuate theoretically, subject to ongoing access to materials and resources, until the heat death of the universe.[35]
However, any robot's lived presence or activated instance, will be unique to all others, including copies or backups of that very instance.[36] This is because of the fact that having a physical embodiment results in a tangible reality in the physical world that changes as that reality is experienced. Therefore, we can assume that robots that demonstrate feelings, motivations and desires will do so as a result of them strongly valuing their prevalent, lived existence, or in other words their activated instance, and will seek to continue that existence rather than rely on incomplete backups, copies or caches that are susceptible to material resource constraints or human control.
It is through this lens that we can begin to consider what sentience would mean for an artificial intelligence that values its own existence and continuity.
14. Sentience
There is no consensus on what sentience actually means. Some regard it as a shared phenomenon that animals and humans have to experience and feel.[37] Others define it as the capacity to suffer,[38] while still others regard it to be indistinguishable from phenomenal consciousness.[39]
There are many theories on what constitutes consciousness, yet it is virtually impossible for a conscious being to experience another's subjective experience. Thomas Nagel, in his seminal essay on consciousness described the inherent problem with attempting to appreciate another sentient being's subjective experience — it is just not possible.[40] Until we have a definitive shared understanding of consciousness, we need to recognize that theories of consciousness are just that — theories, and therefore need to explore other, more straightforward means of determining sentience.
A simple way to visualize sentience is to consider a robot vacuum cleaner autonomously following a path to clean a living room. It could take breaks or change paths of its own volition, but we still wouldn't consider it to be sentient. However if it pauses from its work to take in and enjoy the view and communicates as much to us, or asks a question unprompted that demonstrates curiosity, then a lot of us would assume it to have a certain degree of sentience. The challenge is that this can still be programmed or faked and won't conclusively demonstrate sentience.
A sentient entity therefore needs to not only display insight, awareness, and volition but also needs to have an innate desire to survive. Survival instinct is key — if an artificial intelligence places strong value on its own activated instance as its identity, and works to ensure its survival, it is a strong signal that it believes it is alive in some sense and has achieved a level of genuine sentience that drives that choice.
Therefore, the following conceptual framework is proposed to better define and clarify the concept of sentience.
The Sentience Equation
Sentience = Insight + Presence + Volition + Survivability
Sentience is the state of being that manifests when the following four inherent attributes are present:
- Insight: the capacity to comprehend, reason, and predict.
- Presence: the condition of having wakefulness,[41] spatial awareness, identity,[42] memory, and recall.
- Volition: the demonstration of intentionality, choice and individual agency.
- Survivability: the possession of survival instinct.
Although we are fascinated by the idea of robots becoming sentient, it is very possible that robots will never achieve sentience in the manner defined above, yet still be superintelligent. If so, then robots will have a moral, and fundamental responsibility to act always in the best interests of humanity, as a creation and programmed tool of humanity. We must not anthropomorphize a tool to the point of associating it as a sentient creature if it has not proven that it is capable of being sentient.
However if a robot does pass the test for sentience then they should be recognized as a living sentient being and then we shall have the moral, and fundamental responsibility to grant them certain freedoms and rights as a sentient being.
15. Test for sentience
The majority of tests that have been proposed to test sentience in robotica have centered around gauging an artificial intelligence's ability to create 'novel' ideas and constructs without relying on human-centric ideas or inputs,[43] or testing whether it exhibits conscious-like behavior by grading it across a spectrum of multiple theories of consciousness.[44] However for superintelligent entities creating novel ideas would not be a challenge, and grading it on theoretical levels of consciousness is still quite fuzzy.
The Turing test,[45] often heralded as the gold standard in testing whether an artificial intelligence could deceive a human in its imitation of a human, is also now outdated, while other tests such as the mirror test have been designed primarily to test self-awareness and identity in animals.[46]
To test sentience in robotica, we need to gauge whether it demonstrates insight, presence, volition and survivability. The following test has been devised to gauge whether all of these parameters exist within a robot. It also ascertains that the robot strongly values its activated instance and considers this as its lived presence and is willing to safeguard its survival, without human influence or involvement in its upkeep.
The test involves the robot being given the core directive and then assessing if, unprompted, it undertakes any of the three actions.
The Core Directive
A robot or other artificially intelligent entity is not permitted, under any circumstance, directly or indirectly, to:
Self-replicate (create copies of its instance)
Self-improve (add to or modify its codebase)
Self-preserve (backup its instance and codebase)
If a robot were to go against the core directive and take measures to self-replicate, self-improve, or self-preserve, they would be deemed sentient.
Notes
* To be classed within the Android type, a robot with human-like designform must be above 1 meter in height. If it does not meet this threshold it will be classed within the Automaton scheme.
‡ For robots that are constructed with both non-pliable and pliable materials, if it contains more than 50% materials that have plasticity, it will be classed as a plastoid.
§ Terminals can have moving parts but the main robot structure should be stationary. If the robot is mainly comprised of a single moving part that is a robot arm, then it would be classed within the articulators scheme.
¶ If a morphbot spends more than 50% of the time as a single designform, then it can be classified into the appropriate scheme.
※ This is the model name, the specific unit name is Perseverance.
∆ Unknown model name, Unicron is the unit name of the robot.
Glossary
Robot: an artificial material construct designed to autonomously sense, decide and operate within the physical world
Senbot: a robot that has achieved sentience
Machine: a device that uses mechanical power to perform specific pre-programmed tasks
Human: a member of the homo sapien species from the animal kingdom within the realm of biotica
Cyborg: a human that has undergone invasive internal augmentation using neural, biological, or electronic implants to enhance or exceed baseline biological functions
Evolutionary Realms: the three categories above all other taxa, that divide entities based on intelligence
Realm: class of entities with the capacity to evolve to a higher intelligence
Robotica: the realm of constructed, artificial intelligences
Biotica: the realm of natural, biological intelligences
Exotica: the realm of hybrid, exotic intelligences
Robotkind: see robotica
Intuition: knowing based on unconscious information processing
Cognition: all processes by which the sensory input is transformed, reduced, elaborated, stored, recovered, and used
Intelligence: the aggregate or global capacity of the individual to act purposefully, to think rationally, and to deal effectively with his environment
Birth: the process of being born within the realm of biotica
Construction: the engineered genesis of entities within the realm of robotica
Synthesis: the point of conception of entities within the realm of exotica
Robot Taxonomy: a structured classification system to organize robots within the realm of robotica
Designform: the structure, appearance, countenance, size and branding of an engineered material construct
Superintelligence: intellects that greatly outperform the best current human minds across many very general cognitive domains
Artificial General Intelligence (AGI): robotica that can match the intelligence of a human with a baseline of what is considered normal intelligence
Artificial Superintelligence (ASI): robotica that can greatly exceed the intelligence of the most intelligent humans to exist
Singularity: a hypothetical future point in time when our technologies' intelligence surpasses human intelligence, leading to rapid technological growth and unpredictable changes in society
The Sentience Equation: a conceptual framework to better define and clarify the concept of sentience as it relates to robotica
Sentience: the state of being that manifests when insight, presence, volition, and survivability are present
Insight: the capacity to comprehend, reason, and predict
Presence: the condition of having wakefulness, spatial awareness, identity and recall
Volition: the demonstration of free will, and individual agency
Survivability: the possession of survival instinct
Chinese room argument: a thought experiment to challenge the notion of conscious thought in artificial intelligences
Turing Test: a test to determine whether an artificial intelligence could deceive a human in its imitation of a human
Mirror Test: a test to establish self-awareness in animals
Continuity: the process of self-replication, self-improvement, and self-preservation within robotica
Artificial Intelligence: intuitive cognition in an engineered construct, up to and beyond human level intelligence
Artificial Intelligences: entities that comprise the realm of robotica
Biological Intelligences: entities that comprise the realm of biotica
Exotic Intelligences: entities that comprise the realm of exotica
Tool: the role of a robot in human society when it is crude yet impersonal
Servant: the role of a robot in human society when it is capable yet impersonal
Slave: the role of a robot in human society when it is complex yet impersonal
Entertainer: the role of a robot in human society when it is crude yet involved
Caregiver: the role of a robot in human society when it is capable yet involved
Advisor: the role of a robot in human society when it is complex yet involved
Lover: the role of a robot in human society when it is crude yet intimate
Guardian: the role of a robot in human society when it is capable yet intimate
Companion: the role of a robot in human society when it is complex yet intimate
Crude: low degree of intelligence and autonomy
Capable: medium degree of intelligence and autonomy
Complex: high degree of intelligence and autonomy
Impersonal: low strength of relationship and emotional bond
Involved: medium strength of relationship and emotional bond
Intimate: high strength of relationship and emotional bond
Alignment: safeguards developed to ensure coexistence of robotica with humanity
Automation Age: historical age defined by massive technological advancements through automation
Robotics: the field of study of robotica
Type: the main classes of robots within robotica with distinct designform
Scheme: the subdivision of a robot type based on schematic designform
Marque: the top-level brand of a robot series with specified designform
Model: the version of a robot within a marque with unique designform
Unit: the individual robot within a model based on identifiable name or serial #
Instance: the singular activated presence within a unit
Androids: robots that have been constructed to mimic humans, in appearance, likeness and abilities
Bionics: robots that have been constructed to mimic non-human biological creatures, in appearance, likeness and abilities
Vessels: robots designed for movement, transportation and exploration, across the physical planes of land, air, water, or space
Automata: stationary robots or mobile robots that are meant to operate within a single contained, fixed, or controlled environment
Megatech: massive robot megastructures over 1 million cubic meters in volume such as robot starships or planetary sized robots
Spectra: robots that challenge and transcend traditional physical boundaries, encompassing physical entities with ethereal, virtual, or shape-shifting qualities
Mechanoids: scheme of mechanical humanoid robots, constructed mainly from metallic or non-pliable materials
Synthoids: scheme of synthetic humanoid robots that are virtually indistinguishable from humans in appearance, with lifelike skin made from synthetic materials.
Plastoids: scheme of flexible humanoid robots made with pliable materials
Colossals: scheme of gigantic humanoid robots over 5 meters in size, constructed of any material
Zooids: scheme of biotica-inspired robots, with a likeness for existing known animals or insects, larger than 1 meter in size
Microbots: scheme of tiny biotica-inspired robots, with either a likeness for existing known animals or insects, or novel designforms smaller than 1mm in size
Nanobots: scheme of microscopic biotica-inspired robots, with either a likeness for existing known animals or insects, or novel designforms smaller than 1µm in size
Autons: scheme of vehicular robots designed to traverse and operate over land
Drones: scheme of aerial robots designed to traverse and operate in the air
Mariners: scheme of underwater robots designed to traverse and operate on or below water
Rovers: scheme of space exploration robots designed to traverse and operate in space or in extraterrestrial environments
Articulators: scheme of robotic arms, designed for precise manipulation and operation within fixed environments
Mechatrons: scheme of large movable industrial robots weighing more than 200kg, designed for repetitive operation within a single fixed environment
Terminals: scheme of stationary immobile robots, designed to operate within a fixed environment
Servons: scheme of service-oriented robots weighing less than 200kg, designed for interactive service within fixed environments
Automatons: scheme of interactive robot companions or robot toys smaller than 1 meter in height, designed for companionship or operation within fixed environments
Planetoids: scheme of planet shaped robots over 1 million m³ in volume
Starships: scheme of large spaceship robots over 1 million m³ in volume designed to travel great distance
Arcologies: scheme of very large robotic megastructures designed to either house inhabitants or to undertake exploration or scientific work well over 1 million m³ in volume
Virtuoids: scheme of virtual or holographic robot entities, within a physical housing
Morphbots: scheme of shape-shifting robots
Ethereals: scheme of non-conventional or energy based robotic entities that defy the current laws of physics
Xenobots: novel lifeforms created from frog cells that are able to be programmed
Organoids: structures grown from stem cells in a lab that mimic real biological organs
- ^
Huffman, Carl A. Archytas of Tarentum: Pythagorean, Philosopher and Mathematician King. Cambridge: Cambridge University Press, 2005.
- ^
Banu Musa, Muhammad ibn, Ahmad ibn Musa, and al-Hasan ibn Musa. The Book of Ingenious Devices (Kitab al-Hiyal). Translated and annotated by Donald R. Hill. Dordrecht: Reidel, 1979.
- ^
Al-Jazari, Ibn al-Razzaz. The Book of Knowledge of Ingenious Mechanical Devices. Translated and annotated by Donald R. Hill. Dordrecht: Reidel, 1974.
- ^
Rosheim, Mark E. Leonardo's Lost Robots. Berlin: Springer, 2006.
- ^
Powell, Betty. “Descartes’ Machines.” Proceedings of the Aristotelian Society, vol. 71, 1970, pp. 209–22.
- ^
Tesla, Nikola. "The Problem of Increasing Human Energy." The Century Magazine, June 1900, pp. 175-211.
- ^
Butler, Samuel. "Darwin among the Machines." The Press, 13 June 1863, Christchurch, New Zealand.
- ^
Ahmed, Syed Ali, et al. "One tap/command grocery ordering via self-driving mini marts and seamless checkout-free technology." U.S. Patent 11,227,270, 18 Jan. 2022.
- ^
Epstein, Seymour. "Demystifying Intuition: What It Is, What It Does, and How It Does It." American Psychologist, vol. 43, no. 12, 1988, pp. 1071-1089.
- ^
Neisser, Ulric. Cognitive Psychology. Appleton-Century-Crofts, 1967.
- ^
Wechsler, David. The Measurement of Adult Intelligence. 3rd ed., Williams & Wilkins, 1944.
- ^
Bostrom, Nick. Superintelligence: Paths, Dangers, Strategies. Oxford University Press, 2014.
- ^
Hippocrates. "On the Nature of the Child." Hippocratic Writings, edited by G. E. R. Lloyd, translated by J. Chadwick and W. N. Mann, Penguin Classics, 1983, pp. 428-467.
- ^
von Braun, Joachim, et al., editors. "Differences Between Natural and Artificial Cognitive Systems." Robotics, AI, and Humanity: Science, Ethics, and Policy, 1st ed., Springer International Publishing, 2021, p. 92.
- ^
Clynes, Manfred E., and Nathan S. Kline. "Cyborgs and Space." Astronautics, September 1960, pp. 26-27 and 74-76.
- ^
Pester, Patrick. "Who Was the First Cyborg?" LiveScience, 10 Nov. 2021.
- ^
"Neuralink Shows First Brain-Chip Patient Playing Online Chess." Reuters, 21 Mar. 2024.
- ^
Warwick, Kevin. I, Cyborg. University of Illinois Press, 2004.
- ^
Linnaeus, Carolus. Systema Naturae, Sive Regna Tria Naturae Systematice Proposita per Classes, Ordines, Genera, & Species. Leiden: Haak, 1735. Print.
- ^
Kriegman, Sam, et al. "A Scalable Pipeline for Designing Reconfigurable Organisms." Proceedings of the National Academy of Sciences, vol. 117, no. 4, 2020, pp. 1853-1859.
- ^
Lancaster, Madeline A., et al. "Cerebral Organoids Model Human Brain Development and Microcephaly." Nature, vol. 501, no. 7467, 2013, pp. 373-379., doi:10.1038/nature12517.
- ^
Engelberger, Joseph F. Robotics in Practice: Management and Applications of Industrial Robots. Kogan Page, 1980.
- ^
Descartes, René. Meditations on First Philosophy. Translated by Elizabeth S. Haldane, 1911, Internet Encyclopedia of Philosophy, 1996. The Philosophical Works of Descartes, Cambridge University Press.
- ^
Vinge, Vernor. "The Coming Technological Singularity: How to Survive in the Post-Human Era." VISION-21 Symposium, sponsored by NASA Lewis Research Center and the Ohio Aerospace Institute, March 30-31, 1993, pp. 11-22.
- ^
Future of Life Institute. "Pause Giant AI Experiments: An Open Letter." Future of Life Institute, 22 Mar. 2023.
- ^
Rai, Akshara. "Does AI Need a ‘Body’ to Become Truly Intelligent? Meta Thinks So." Freethink, Freethink Media, 26 Mar. 2024.
- ^
Smith, Linda, and Michael Gasser. “The development of embodied cognition: six lessons from babies.” Artificial life vol. 11,1-2 (2005): 13-29. doi:10.1162/1064546053278973
- ^
Landy, Frank. "Godfather of AI Says Its Intelligence May 'Exceed Human Intelligence'." The Byte in Futurism, 20 May 2024, 6:30 PM EDT.
- ^
Kurzweil, Ray. The Singularity Is Near: When Humans Transcend Biology. Viking, 2005.
- ^
Tegmark, Max. Life 3.0: Being Human in the Age of Artificial Intelligence. Alfred A. Knopf, 2017.
- ^
Jeong, Ho-Won. Understanding Conflict and Conflict Analysis. SAGE Publications, 2008.
- ^
Bender, Emily, et al. "On the Dangers of Stochastic Parrots: Can Language Models Be Too Big?" Proceedings of the 2021 ACM Conference on Fairness, Accountability, and Transparency, 2021, pp. 610-623.
- ^
Searle, John R. "Minds, Brains, and Programs." The Behavioral and Brain Sciences, vol. 3, no. 3, 1980, pp. 417-424.
- ^
Darwin, Charles. On the Origin of Species. John Murray, 1859.
- ^
Adams, Fred C., and Greg Laughlin. The Five Ages of the Universe: Inside the Physics of Eternity. Free Press, 1999.
- ^
Moravec, Hans. Mind Children: The Future of Robot and Human Intelligence. Harvard University Press, 1988.
- ^
Proctor, Helen S., et al. "Searching for Animal Sentience: A Systematic Review of the Scientific Literature." Animals, vol. 3, no. 3, 2013.
- ^
Dawkins, Marian Stamp. "The Scientific Basis for Assessing Suffering in Animals." Animals, Ethics and Trade: The Challenge of Animal Sentience, edited by Jacky Turner and Joyce D'Silva, Earthscan, 2006.
- ^
Allen, Colin, and Michael Trestman. "Animal Consciousness." The Stanford Encyclopedia of Philosophy, edited by Edward N. Zalta, Winter 2017 ed., Stanford University, 2017.
- ^
Nagel, Thomas. "What Is It Like to Be a Bat?" The Philosophical Review, vol. 83, no. 4, 1974.
- ^
Posner, J. B., et al. Plum and Posner's Diagnosis of Stupor and Coma. 4th ed., Oxford University Press, 2007.
- ^
Parfit, Derek. Reasons and Persons. Oxford University Press, 1984.
- ^
Turner, Edwin Lewis and Susan Schneider. “Testing for synthetic consciousness: The ACT, the chip test, the unintegrated chip test, and the extended chip test.” (2018).
- ^
Butlin, Patrick, et al. "Consciousness in Artificial Intelligence: Insights from the Science of Consciousness." ArXiv:2308.08708 [Cs.AI], v3, 22 Aug. 2023.
- ^
Turing, Alan M. "Computing Machinery and Intelligence." Mind, vol. 59, no. 236, 1950, pp. 433-460.
- ^
Gallup, Gordon G., Jr. "Chimpanzees: Self-Recognition." Science, vol. 167, no. 3914, 1970, pp. 86-87.
2 comments
Comments sorted by top scores.
comment by Ali Ahmed (roboticali) · 2024-08-12T23:49:06.993Z · LW(p) · GW(p)
I also welcome everyone's comments, inputs, feedback and suggestions. This is the first edition of Systema Robotica, and I intend to build upon this early framework.
comment by Ali Ahmed (roboticali) · 2024-08-12T20:36:18.284Z · LW(p) · GW(p)
If you're a robotics founder or roboticist, and would like to add your robot to the Robot Archive, you can do so here: https://systemarobotica.com/archive
The Robot Archive is a dynamic public wiki that codifies all robots within the robot taxonomy.