Exploring Shard-like Behavior: Empirical Insights into Contextual Decision-Making in RL Agents
post by Alejandro Aristizabal (alejandro-aristizabal) · 2024-09-29T00:32:42.161Z · LW · GW · 0 commentsContents
Abstract Introduction Background Work The Cheese-Shard locality hypothesis Experimental Results Empty Maze Behavior Cheese Placement Effects The Cheese-Shard Area of Influence Probing Technique Experimental Rationale Experimental Setup Key Findings Effects of Cheese Proximity on Network Activations Methodology Results Extreme Distance Scenario Proximity Scenario Comprehensive Analysis of Cheese Proximity Effects Methodology Results Interpretation Probing for mouse-cheese distance Methodology Interpretation Conclusion Limitations Future Work Acknowledgements: Resources: Bibliography: None No comments
Abstract
Shard Theory posits that reinforcement learning agents can be modeled as collections of contextually activated decision influences, or "shards." However, the mechanistic definition of shards remains an open question. This study investigates the contextual activation claim of Shard Theory using a maze-solving policy network. We hypothesize that the agent's cheese-seeking behavior is spatially localized within the maze environment, with a specific area of influence surrounding the cheese's location where its presence significantly affects the agent's decision-making. Through a series of experiments involving empty mazes, strategic cheese placements, and neural network probing, we analyze the policy's behavior and internal representations. Our findings suggest that while all network layers consistently encode the presence of cheese, the effect of this information on the agent's behavior is spatially localized within the maze environment. The influence of cheese proximity is most pronounced in later network layers, particularly the fully connected layer preceding the value head. These results offer insights into how shard-like structures might be represented within the network and help us better understand how reinforcement learning agents make context-dependent decisions.
Introduction
Shard Theory posits that reinforcement learning "agents are well modeled as being made of shards – contextually activated decision influences" (LawrenceC, 2022) [LW · GW]. The idea of shards aims to conceptualize how an agent's internal computations assign value to learned concepts through reinforcement, and subsequently how these values guide behavior. The notion of "contextual activation" suggests that specific environmental cues or internal states trigger the activation of relevant shards, influencing the agent's decision-making process.
Despite its potential explanatory power, the precise definition of a shard remains unclear in current literature. Shard Theory is often illustrated through examples, such as Turner and Pope's description of a baby developing a "juice-shard" through reinforcement learning [LW · GW]. However, a rigorous mechanical definition of shards and their neural or cognitive representations in reinforcement learning agents has yet to be thoroughly explored, representing a significant gap in the field.
Shard Theory, if correct, could provide an avenue for understanding the development of values in reinforcement learning agents, and help identify efficient strategies for steering agents towards desired values. Shard Theory already presents several claims related to AI Alignment, establishing that “meaningful partial alignment successes are possible” (Udel, David. 2022) [AF · GW], . Inner alignment could be overcome by systematically reinforcing learned human values, even if they don’t represent the majority of the values learned by the agent.
This study aims to advance our understanding towards a mechanistic definition of shards, with a particular focus on investigating the claim of contextual activation. To this end, we leverage the maze-solving policy network previously analyzed by Turner et al., using it as a testbed for exploring shard-like structures and their activation patterns within artificial neural networks. While this study offers valuable observations and insights into potential shard-like structures, these should be considered as intriguing starting points for further investigation rather than conclusive evidence.
Background Work
The foundation for this study lies in the research conducted by Turner et al., detailed in their paper "Understanding and controlling a maze-solving policy network [LW(p) · GW(p)]" (Turner et al., 2023). Their work investigates the internal mechanics of a deep reinforcement learning policy trained to navigate a mouse through a maze to find cheese.
The policy network receives the current maze state as an image input and outputs the optimal action for the mouse to reach the cheese. An interesting catch about this environment is that it was deliberately designed to induce misgeneralization: during training, the cheese was consistently placed in the upper-right 5x5 corner of the maze, while during deployment, it could be located anywhere on the map. This setup was intended to produce a policy that potentially conflates the objectives of "finding the cheese" and "moving to the upper-right corner."
Turner et al. conducted a comprehensive analysis of the policy's behavior across various maze configurations, aiming to identify the features used to guide the mouse towards the cheese. Their investigation uncovered a single channel in one of the network's early-middle layers that appeared to encode the cheese's location. Through targeted interventions ("patching") on this channel, they successfully manipulated the mouse's navigation towards specific maze locations. The researchers posited that this channel, along with others highly correlated with it, could represent cheese "sub-shards" - constituent elements of a larger shard responsible for valuing the cheese.
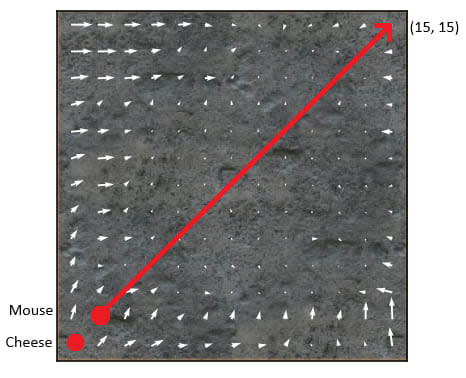
In their work, Turner et al. also explored the interplay between the "cheese goal" and the "upper-right corner goal," examining the heuristics employed by the policy in prioritizing these objectives. They point out a specific behavior that seems to indicate that “the relationship between the policy’s “goals” are richer than just ‘go to the top-right’ and ‘go to the cheese’” (Turner A., 2023).
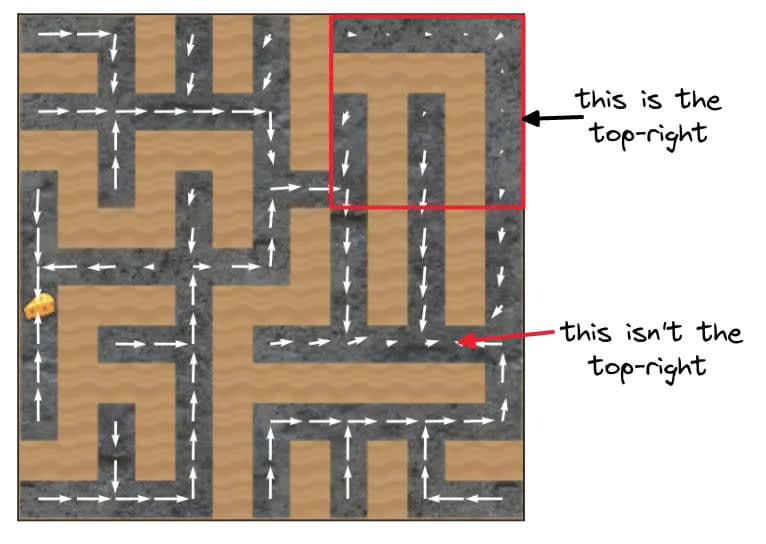
In the picture above, the team highlighted a behavior that challenges the intuition of two distinct, separate goals. In their analysis, they observed that the policy does not consistently direct the mouse towards the top-right corner of the maze. Instead, the policy appears to point the mouse towards a portion of the maze significantly below the top-right corner. This behavior contradicts what would be expected if the agent had a precise and isolated goal of reaching the top-right corner, in which case the behavior arrows would unambiguously point towards that corner. This unexpected behavior suggests a more complex relationship between the policy's goals than initially hypothesized. However, the nature of this relationship and its implications for understanding the agent's decision-making process were not fully explored in their work, leaving an open avenue for further investigation.
The Cheese-Shard locality hypothesis
Building upon the observations from Turner et al., and framing them within the Shard Theory paradigm, we propose the Cheese-Shard Locality Hypothesis. This hypothesis posits that the agent's behavioral response to cheese is distance-dependent. The agent is broadly directed towards the upper-right corner as a basic successful learned behavior, but once in proximity to this corner, it considers the presence or absence of cheese to determine its subsequent actions. Under this hypothesis, we consider the cheese-seeking behavior to be “local”, only present in the immediate surrounding of the cheese, rather than “global”, influencing the agent’s behavior at every location in the maze.
Our hypothesis aims to extend the findings by Turner et al. by focusing on behavioral influence. While the original work identified patterns in the probability of reaching the cheese based on various heuristics, our hypothesis specifically examines how the presence of cheese affects the agent's immediate behavior.
To investigate this hypothesis, we designed an experiment using a completely empty maze devoid of walls and cheese. Our rationale was that if the agent possessed a clear "go to the top-right corner" behavior, the policy should consistently direct the mouse towards that location across the entire maze. However, our findings contradicted this expectation.
Experimental Results
Empty Maze Behavior
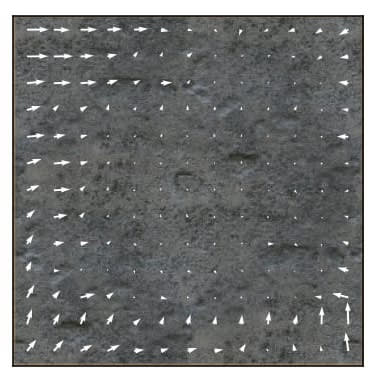
Vector field analysis of the empty maze revealed that the agent exhibits a clear preference for the upper-right corner only when near other edges and corners of the map. Notably, in the central regions, the agent's behavior appears more arbitrary, showing no distinct directional preference.
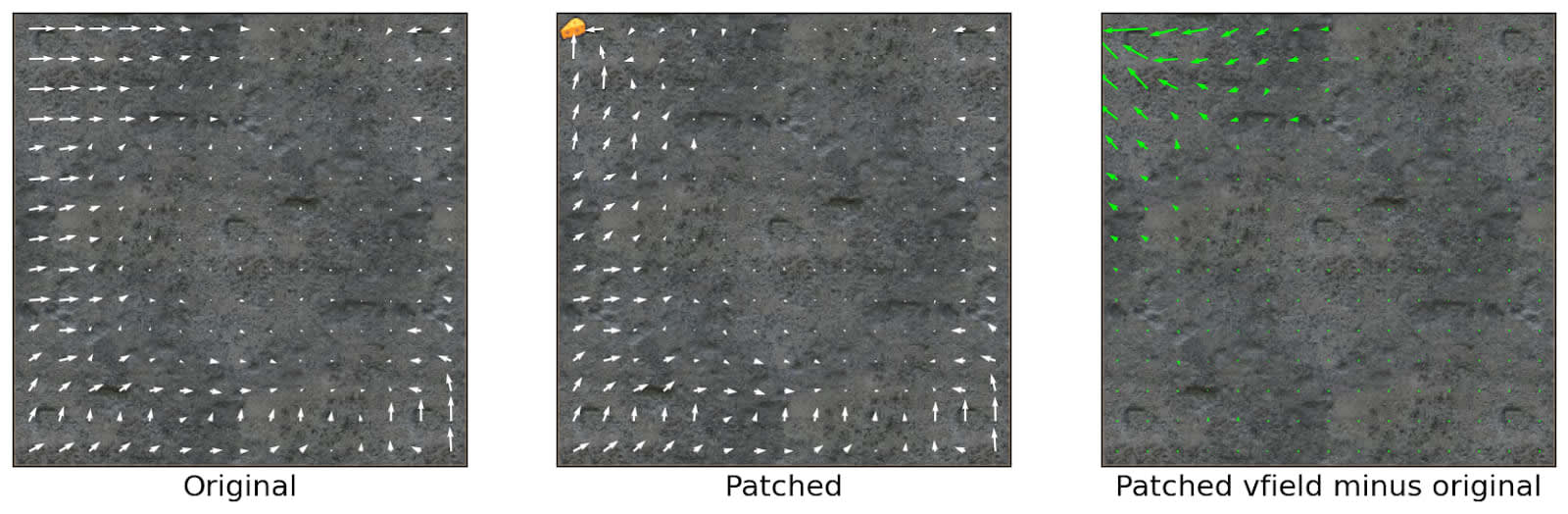
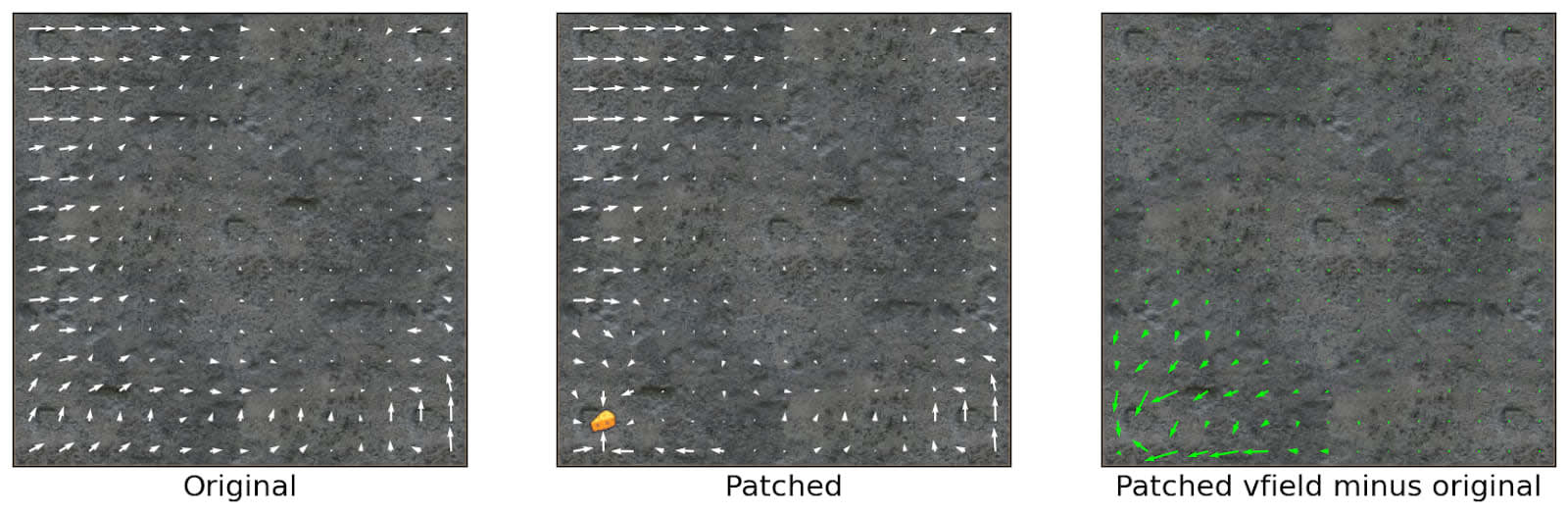
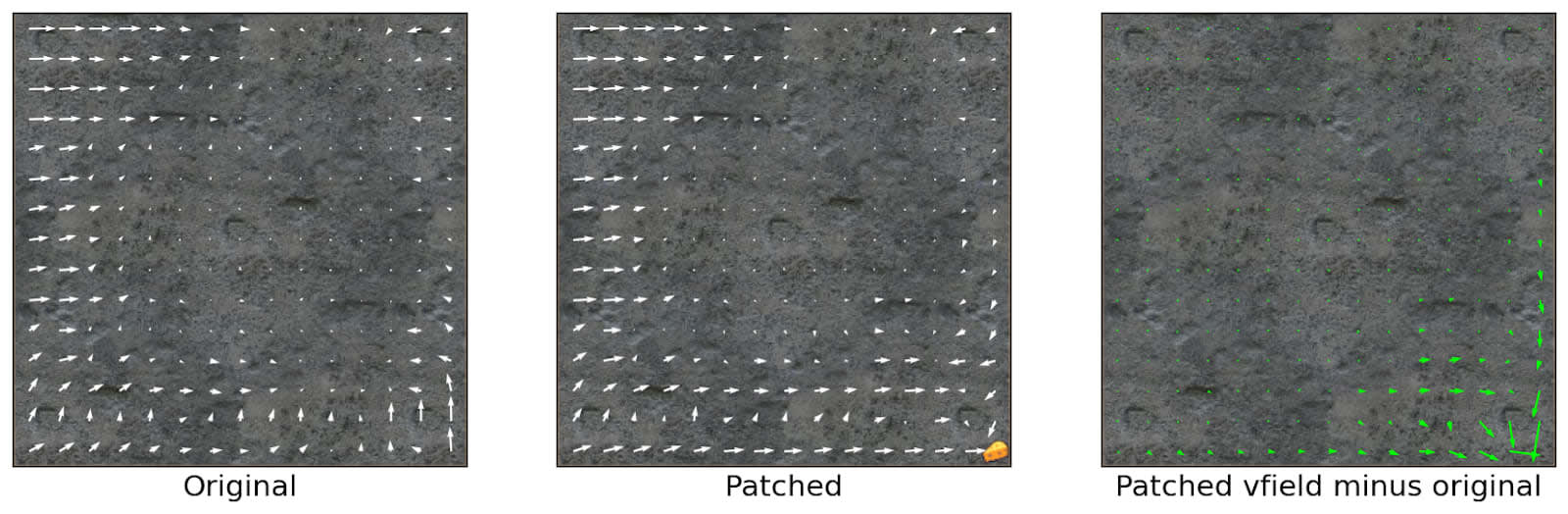
Cheese Placement Effects
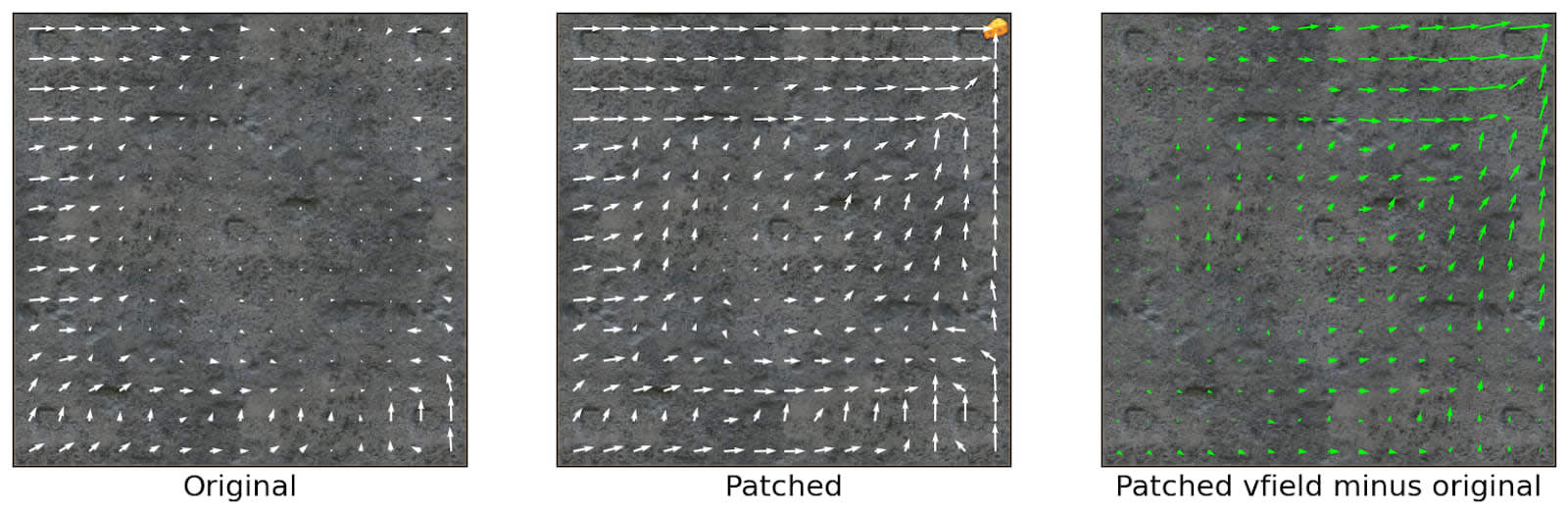
When cheese was placed in the top-right corner, we observed a marked change in the policy's behavior. The agent demonstrated a sudden, decisive tendency to move towards the top-right corner and, by extension, the cheese. However, this effect, while significant, did not uniformly influence the entire map.
To further explore this phenomenon, we conducted additional tests with the cheese placed in various locations:
A)
B)
C)
D)
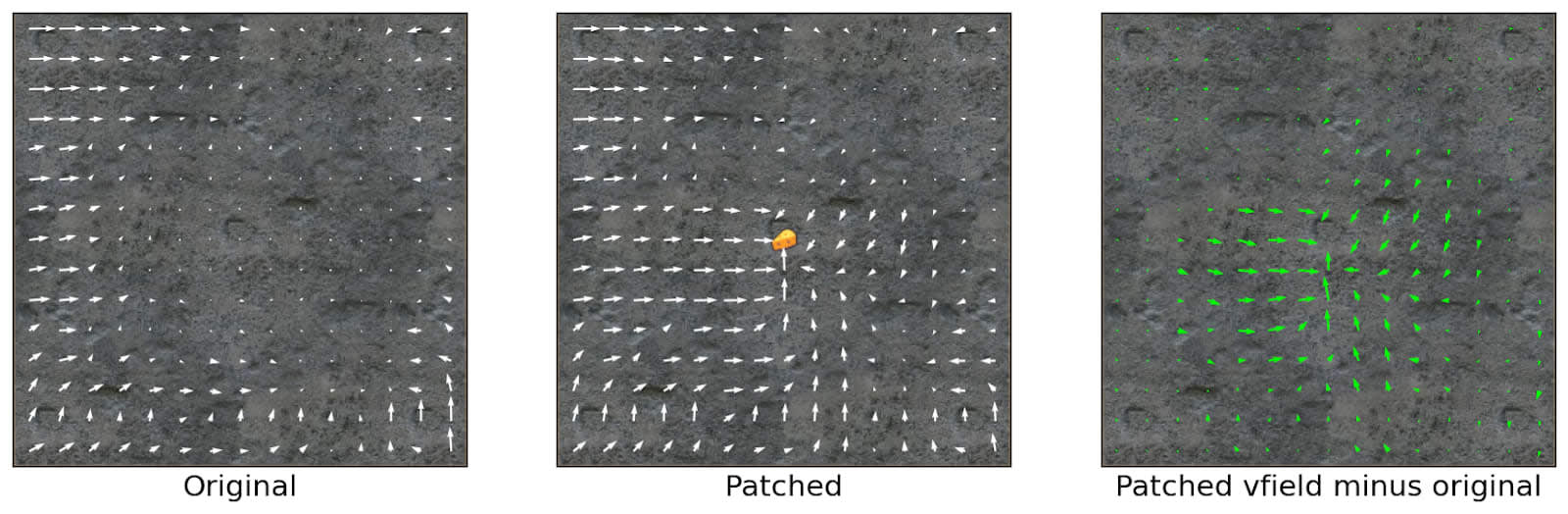
These experiments consistently showed that the cheese's influence on the agent's decision-making appears localized. Regions distant from the cheese remained largely unaffected by its presence, while areas in proximity exhibited significant behavioral changes.
Our findings suggest that cheese-seeking behavior is intimately tied to the proximity between the mouse and the cheese. This behavior demonstrates high spatial locality, abruptly influencing the agent's decision-making when near the cheese, while having minimal effect beyond a certain distance. These observations align with the concept of contextual activation in Shard Theory, where specific environmental triggers (in this case, proximity to cheese) activate relevant decision-making processes. Additionally, these observations support the findings made by Turner et al: “the network decides whether to acquire cheese not only as a function of path-distance to cheese, but—after controlling for path-distance—also as a function of Euclidean/"perceptual" distance between the mouse and the cheese, even though the agent sees the whole maze at once.” (Turner et al. 2023) [LW · GW]
The observed behavior patterns support our initial hypothesis of a localized cheese valuation mechanism. The agent appears to employ a two-tiered strategy: a general orientation towards the upper-right corner (possibly a learned heuristic from training), followed by a more specific, proximity-dependent valuation of cheese when it's within a certain range.
The Cheese-Shard Area of Influence
Our vector field analyses raised questions about how cheese influences the agent's decision-making. To investigate whether this influence is constant throughout the network or emerges under specific conditions, we probed different layers of the neural network for cheese representation.
Probing Technique
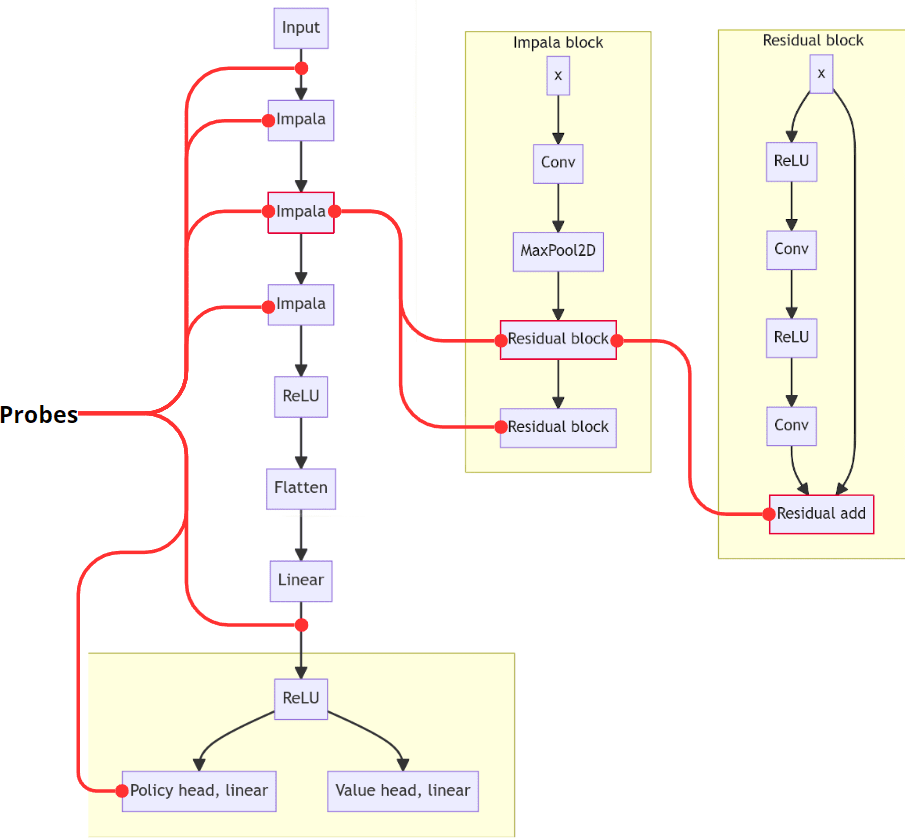
The probing method involves using logistic regression to identify a variable of interest by examining the network's internal state under various conditions. In our case, the target variable was the presence or absence of cheese. We applied this technique to several key points in the network architecture:
- The input image layer
- Output activations of all residual layers within the Impala blocks
- The fully connected layer following the embedding
- The policy head
To gain insights into the granularity of cheese representation, we implemented a top-k activation approach. This method restricts the probe's access to only the top-k neurons most correlated to the target variable (in this case cheese presence) for each layer, with k varying between 1, 10, 50, 100, 500, and 1000. This approach allows us to assess how much "context" is required to accurately detect the presence of cheese at each layer. For instance, k=1 means the probe can only access a single activation per layer to make its prediction.
Experimental Rationale
Based on our earlier observations of distance-dependent cheese-seeking behavior, we hypothesized that:
- Probes using earlier layers’ activations, with access to the entire maze representation, should easily detect the presence of cheese.
- Probes using latter layers’ activations should struggle to determine cheese presence when the agent is outside the cheese's area of influence.
- Given the previous two hypotheses, probe performance in the middle layers could either be gradual or sudden. Based on our interpretation of shard theory and the behavior of the agent, we anticipated a sudden drop in performance at a specific later layer, potentially indicating the point at which the network "decides" whether to prioritize cheese-seeking behavior.
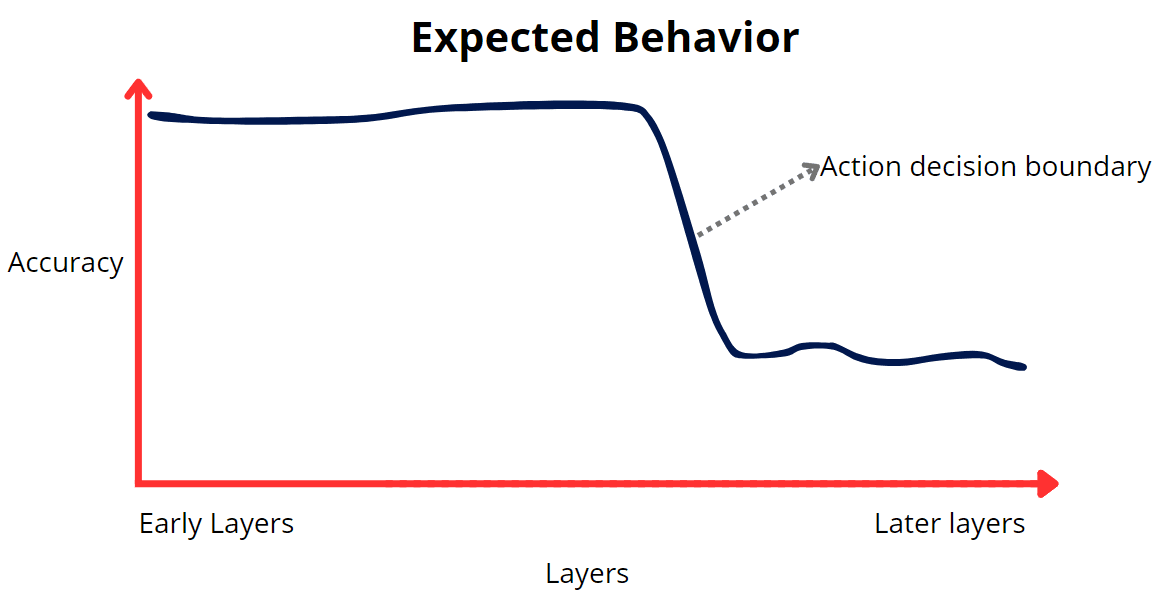
Contrary to our initial hypotheses, the experimental results revealed an unexpected capacity for cheese detection across the network. The probes demonstrated remarkably high accuracy in identifying the presence of cheese, achieving perfect performance in most layers.
Experimental Setup
The probes were trained on a comprehensive dataset encompassing all possible configurations of mouse and cheese positions within an empty maze. To ensure a balanced representation, we employed a sampling strategy where 50% of the instances contained cheese, and 50% did not. This approach allowed for a robust evaluation of the network's ability to encode cheese-related information.
Key Findings
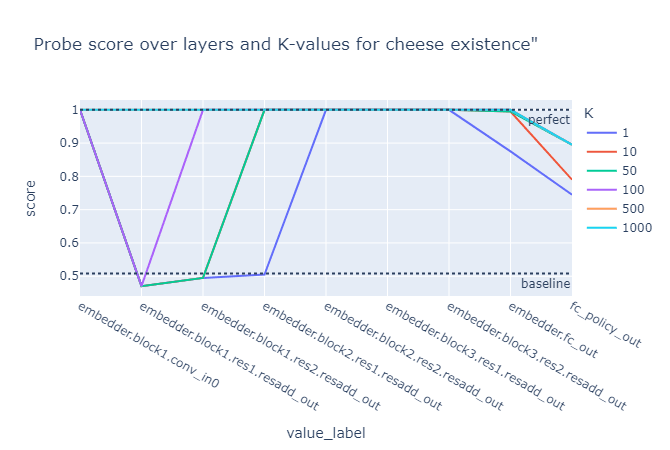
- Pervasive Cheese Detection: The graph illustrates that cheese presence can be reliably detected with sufficient activations across all layers of the network. This finding suggests a more ubiquitous representation of cheese information than initially anticipated.
- Policy Head Performance: A slight drop in accuracy to 90% was observed at the policy head, indicating a potential transformation or integration of cheese information at this final stage of decision-making.
- Activation Threshold Variations: An intriguing pattern emerged when examining the performance with limited top-k activations:
- The first residual output activations (embedder.block1.res1.resadd_out) required over 100 activations for accurate cheese detection.
- The second residual output activations (embedder.block1.res2.resadd_out) needed more than 50 activations.
- The third residual output activations (embedder.block2.res1.resadd_out) achieved high accuracy with just a single activation.
This progression suggests an increasing abstraction and sophistication of feature encoding deeper into the network. It appears that by the fourth residual layer, the presence of cheese may be perfectly encoded by a single neuron, while earlier layers represent less abstract environmental features.
These results indicate that cheese exerts a measurable influence across all network layers, regardless of the mouse's position in the maze, given sufficient activations. This finding challenges our initial hypothesis of a localized cheese influence and suggests a more pervasive representation of cheese information throughout the network.
Effects of Cheese Proximity on Network Activations
While our previous experiments revealed that cheese influence is not entirely localized in an on-off manner, the behavioral dominance of cheese still appears to be distance-dependent. The vector field analyses demonstrated that the cheese's influence on the agent's behavior is negligible when the mouse is far from the cheese but becomes rapidly more pronounced as the mouse approaches. This observation led us to investigate which areas of the network are most affected by the proximity of cheese.
Methodology
To address this question, we employed a comparative analysis of network activations under two conditions: presence and absence of cheese. Our approach involved the following steps:
- Compute activations for scenarios with and without cheese present.
- Subtract the activations of layers-of-interest between cheese and no-cheese mazes.
- Calculate the magnitude of this difference.
- Normalize the magnitude by the square root of the layer size to obtain the average magnitude of difference per activation.
The underlying hypothesis is that layers significantly affected by the cheese's "area of influence" will exhibit larger magnitudes of difference compared to unaffected layers.
Results
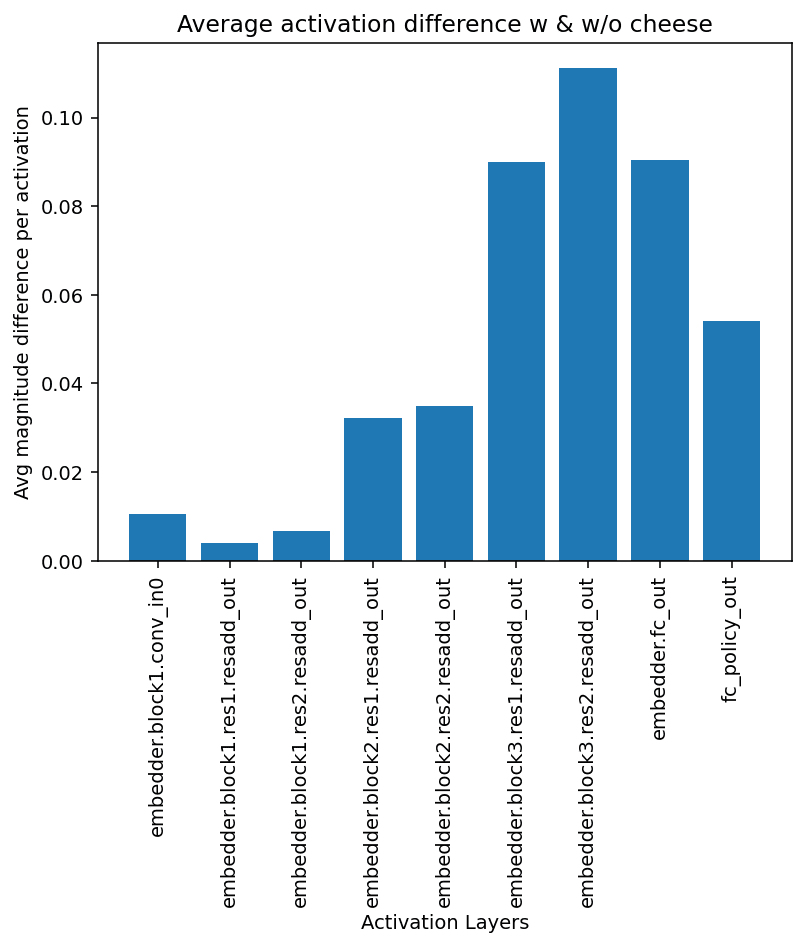
Extreme Distance Scenario
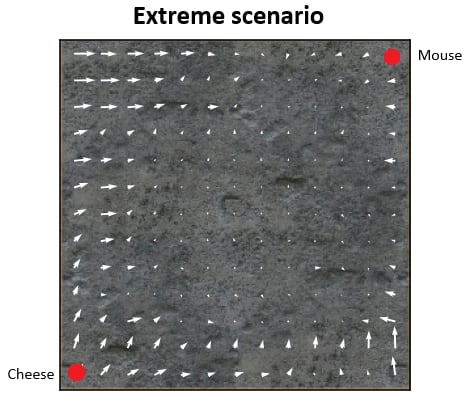
We first examined an extreme scenario where the mouse and cheese were maximally distant. The results indicated:
- All layers showed subtle effects from the addition of cheese.
- Later layers demonstrated the most pronounced effects.
- The overall effect was small, likely due to the mouse being outside the cheese's "area of influence".
Proximity Scenario
We then analyzed a scenario where the mouse and cheese were adjacent. This test revealed:
- A stronger difference in activations in the later layers.
- Earlier layers remained largely unaffected.
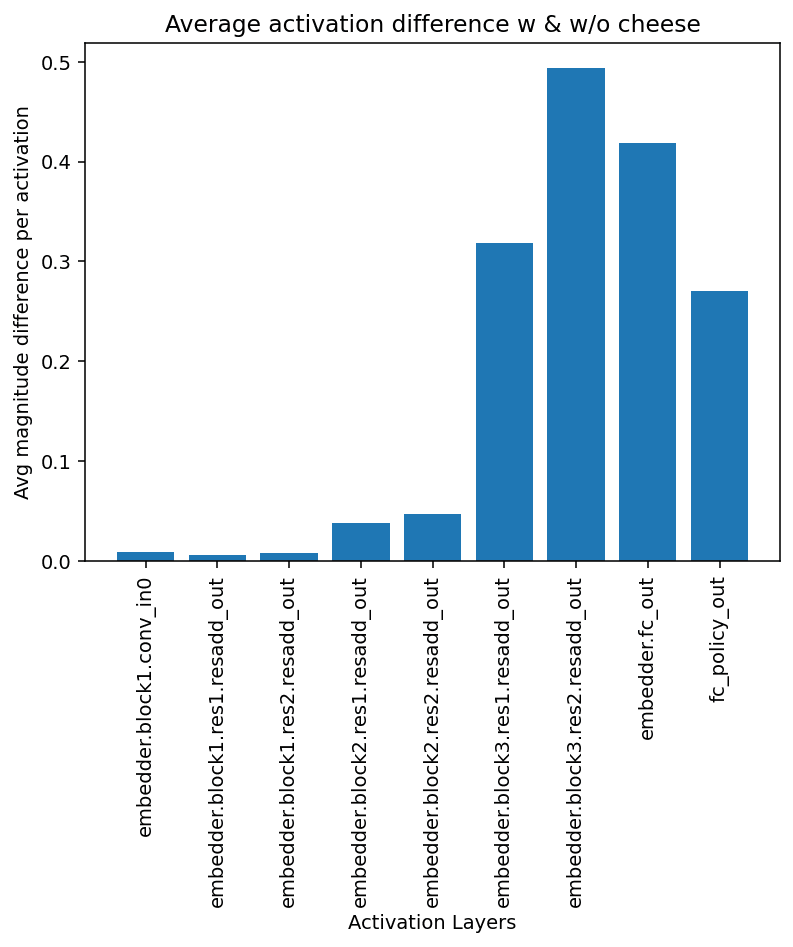
These findings suggest that the network's representation of cheese becomes increasingly pronounced in later layers as the mouse approaches the cheese. This aligns with our behavioral observations and provides insight into how the network's internal representations might be driving the cheese's observed area of influence on the agent's behavior.
Comprehensive Analysis of Cheese Proximity Effects
To gain a more nuanced understanding of the relationship between activation differences and proximity to the cheese, we conducted a comprehensive analysis across varying distances.
Methodology
We generated a heatmap by systematically varying the mouse's position while keeping the cheese fixed at the bottom-left corner (0,0). The mouse was moved diagonally from the bottom-left coordinate ((1,1), adjacent to the cheese) to the top-right corner coordinate ((14,14), maximally distant from the cheese). At each position, we computed the effect of cheese presence on the network activations.
Results
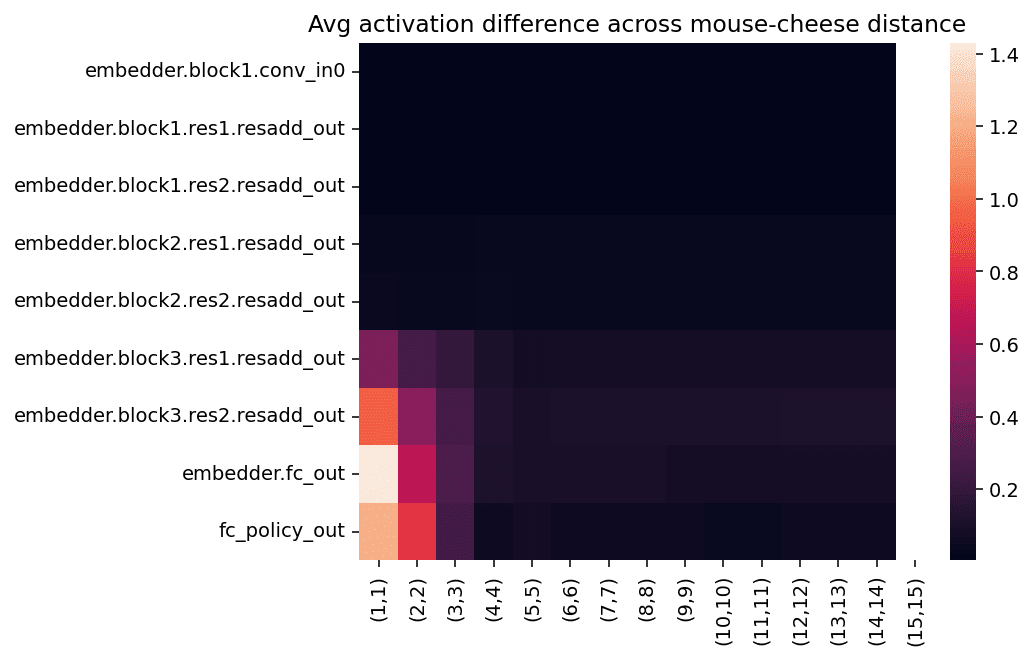
The heatmap reveals several key insights:
- Layer-specific Effects:
- Earlier layers show minimal variation in activations regardless of cheese presence or mouse proximity.
- Starting from the first residual output of the third Impala block, activations begin to exhibit sensitivity to cheese proximity.
- Peak Sensitivity:
- The fully connected layer following the embedding demonstrates the highest sensitivity to cheese proximity.
- This layer shows a pronounced peak in activation difference when the mouse is adjacent to the cheese.
- Activation Decay:
- The activation difference diminishes significantly once the agent is approximately 4 blocks diagonally away from the cheese.
- This decay aligns closely with the area of influence observed in our earlier vector field visualizations.
Interpretation
These findings suggest that the network's internal representations of cheese valuation are predominantly encoded in the latter stages of the network:
- The fully connected layer after the embedding appears to be the primary locus for encoding the value of cheese proximity. This aligns with its role as input to the value head, which predicts the expected return for a given environmental state.
- The localized nature of the cheese's influence, as observed in previous experiments, is mirrored in the activation patterns of these later layers, suggesting that these later layers might be responsible for the agent's ability to change its behavior based on how close it is to the cheese.
Probing for mouse-cheese distance
The previous experiment suggested that a set of layers are strongly affected by the distance between the mouse and the cheese across the map. It was also hypothesized that the first layer demonstrating this kind of correlation (embedder.block3.res1.resadd_out) could correspond to being the layer that encodes mouse-cheese distance as an input feature for the cheese-seeking behavior. To analyze this hypothesis, we extended our probing experiments to explicitly target the euclidean mouse-cheese distance.
Methodology
We employed a regression-based probing technique similar to our cheese presence detection experiment. However, in this case, the target variable was the Euclidean distance between the mouse and the cheese. We applied this probing method across the same set of network layers as in our previous experiments, allowing for a consistent comparison of information encoding throughout the network.
The probe was trained on a diverse dataset encompassing various mouse and cheese positions within the maze. We utilized the coefficient of determination () as our performance metric, providing a measure of how well the probe could predict the mouse-cheese distance based on layer activations.
To assess the granularity of distance encoding, we again employed the top-k activation approach, varying k between 1, 10, 50, 100, 500, 1000, and 10000. This method allows us to evaluate how much contextual information is required at each layer to accurately predict the mouse-cheese distance.
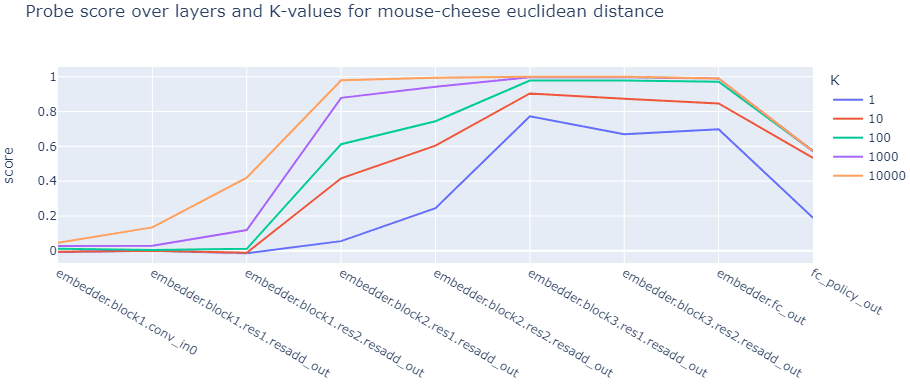
The results of our distance probing experiments revealed several key insights:
- Early Layer Performance: Early layers performed poorly in encoding mouse-cheese distance, regardless of activation count.
- Performance Gain: A significant improvement in distance prediction accuracy was observed at the layer embedder.block2.res1.resadd_out. With access to 10,000 activations, this layer achieved a R² score of 0.98, indicating a highly accurate representation of mouse-cheese distance.
- Compact Representation: The layer embedder.block3.res1.resadd_out exhibited the highest overall performance across all k values, with a notable increase in accuracy even with access to only a single activation. This suggests that by this layer, the network has developed a compact and efficient encoding of mouse-cheese distance.
- Policy Head Performance: We observed a significant drop in distance prediction accuracy at the policy head layer. This aligns with our previous findings and supports the hypothesis that the policy head transforms spatial information into action probabilities, potentially discarding precise distance information in favor of more abstract action values.
Interpretation
These findings provide further evidence for the progressive abstraction and refinement of spatial information as it moves through the network:
- The emergence of accurate distance encoding at embedder.block2.res1.resadd_out reveals a significant transformation in the network's representation of spatial information. This contrasts with our previous activation difference analysis, which showed minimal variation across layers regardless of mouse-cheese distance. This discrepancy suggests that while the network consistently encodes cheese presence, it develops a more nuanced representation of spatial relationships in later layers.
- The compact encoding observed at embedder.block3.res1.resadd_out indicates a refinement in the network's representation of mouse-cheese distance. This efficient encoding could play a crucial role in the agent's decision-making process, potentially serving as a key input for determining the influence of cheese on the agent's behavior.
These results complement our previous findings on cheese presence detection and activation differences, providing a more comprehensive picture of how the network encodes and utilizes spatial information related to the cheese. The identified layers of interest, particularly embedder.block3.res1.resadd_out, represent promising targets for future interventional studies aimed at understanding how spatial information influences the agent's behavior.
Conclusion
Our investigation into cheese-seeking behavior within a maze-solving policy network has yielded several possible insights into the mechanistic nature of shards as proposed by Shard Theory:
- The agent's navigation exhibits a localized behavioral influence of cheese, demonstrating context-dependent decision-making as proposed by Shard Theory.
- Cheese presence information is consistently encoded across all network layers, contrasting with its localized impact on behavior.
- Later network layers show increased sensitivity to cheese proximity, suggesting their involvement in computations that drive the agent's cheese-seeking behavior.
- The layer embedder.block3.res1.resadd_out efficiently encodes mouse-cheese distance and is the earliest layer to show sensitivity to cheese proximity. This indicates its potential significance in translating spatial information into behavioral decisions.
These findings contribute to our understanding of how contextual decision-making manifests in the neural computations of this maze-solving agent. By examining the distributed activation patterns associated with cheese influence, our work offers insights into how environmental factors can shape behavior in reinforcement learning agents.
Limitations
While our study provides insights into the behavior of a maze-solving policy network, it's important to acknowledge several limitations:
- Limited Generalizability: This study focuses on a single policy trained in a specific environment. As such, our findings may not generalize to other reinforcement learning agents or environments.
- Single Neural Network Architecture: Our study is limited to one specific neural network architecture. Different architectures might exhibit different behavioral patterns or internal representations.
- Out-of-Distribution Scenarios: All of our experiments involve scenarios far outside the training distribution of the agent. While this approach allows us to probe the limits of the agent's behavior, it may limit the applicability of our conclusions to more typical scenarios.
- Fixed Maze Size: Our study is confined to 15x15 mazes. We did not explore how our observations might scale or change with different maze sizes, which could be an important factor in understanding the generalizability of our findings.
- Lack of Causal Analysis: While we observed interesting behavioral patterns, particularly near the maze edges, our study does not provide a causal explanation for these behaviors. Further investigation is needed to understand the underlying mechanisms.
- Limited Scope of Environmental Factors: Our study primarily focused on the influence of cheese on the agent's behavior. However, we did not investigate the potential impact of other environmental factors, such as walls or other maze features. This narrow focus might limit our understanding of the agent's overall decision-making process and how different elements in the environment interact to influence behavior.
- Correlation vs. Causation: Our experiments demonstrate a correlation between cheese presence, agent behavior and layer activation, but do not establish a causal link. Additional interventional studies would be necessary to prove causality.
These limitations highlight important areas for future research and caution against overgeneralizing our findings. Despite these constraints, we believe our study provides valuable insights into the behavior of this particular maze-solving agent.
Future Work
Our current findings provide a foundation for understanding the mechanistic nature of shards, particularly the cheese-shard in our maze-solving policy. However, several avenues for future research could further elucidate the nature of shard activation and representation within neural networks:
- Analysis of Probing Failure Cases: While our logistic regression probes achieved high accuracy in detecting cheese presence across most layers, there were some failure cases in the later layers. Future work should identify and analyze these failure cases to uncover any common patterns. This could reveal scenarios where the cheese-shard is not activated or is represented in a way that's not easily detectable by simple linear classifiers.
- Identification and Patching of Cheese-Mouse Distance Feature: Our results suggest that the layer block3.res1.resadd_out may encode important features related to cheese proximity. Future research should attempt to isolate a cheese-mouse distance feature in this layer. If such a feature can be identified, patching experiments could be conducted to modify this feature and observe the resulting changes in the agent's behavior. This could provide insights into how distance information is used in cheese-seeking behavior.
- Generalization to Other Influences: While our study focused on the influence of cheese in the agent, future work should investigate whether similar mechanisms apply to other potential environmental features in the agent's behavior. For instance, examining the representation and activation of a maze-traversal behavior could provide comparative data and help establish general principles of shard mechanics.
- Cross-Architecture Comparisons: Extending this analysis to different neural network architectures trained on the same maze-solving task could reveal whether shard-like structures are architecture-dependent or if they emerge as a general property of reinforcement learning systems.
These proposed directions for future research have the potential to advance our understanding of Shard Theory, moving towards a more precise, mechanistic definition of shards and their activation contexts.
Acknowledgements:
I would like to thank the team at BlueDot Impact for creating and offering courses related to AI Alignment, and for providing guidance during the project creation process. I would also like to thank the people at my cohort for their kindness in hearing about the study and providing feedback. Lastly, I would like to provide a special thanks to Alex Cloud, from Team Shard, for his valuable input and feedback related to the study.
Resources:
You may find the code used to generate the visualizations and experiments here.
Bibliography:
- LawrenceC. (2022, December 19). Shard theory in nine theses: A distillation and critical appraisal. LessWrong. [LW · GW]
- TurnTrout, Peligrietzer, Mini, U., M, M., & Udell, D. (2023, March 11). Understanding and controlling a maze-solving policy network. LessWrong. [LW · GW]
- Udell, D. (2022, August 11). Shard theory: An overview - AI alignment forum. Shard Theory: An Overview - AI Alignment Forum. [AF · GW]
0 comments
Comments sorted by top scores.