The More Power At Stake, The Stronger Instrumental Convergence Gets For Optimal Policies
post by TurnTrout · 2021-07-11T17:36:24.208Z · LW · GW · 7 commentsContents
Edit, 5/16/23: I think this post is beautiful, correct in its narrow technical claims, and practically irrelevant to alignment. This post presents a cripplingly unrealistic picture of the role of reward functions in reinforcement learning. Reward functions are not "goals", real-world policies are no...
Why this is true
Conjecture
Invariances
Note of caution, redux
Conclusion
None
7 comments
Edit, 5/16/23: I think this post is beautiful, correct in its narrow technical claims, and practically irrelevant to alignment. This post presents a cripplingly unrealistic picture of the role of reward functions in reinforcement learning. Reward functions are not "goals", real-world policies are not "optimal", and the mechanistic function of reward is (usually) to provide policy gradients to update the policy network.
I expect this post to harm your alignment research intuitions unless you've already inoculated yourself by deeply internalizing and understanding Reward is not the optimization target [LW · GW]. If you're going to read one alignment post I've written, read that one.
Follow-up work (Parametrically retargetable decision-makers tend to seek power [LW · GW]) moved away from optimal policies and treated reward functions more realistically.
Environmental Structure Can Cause Instrumental Convergence [LW · GW] explains how power-seeking incentives can arise because there are simply many more ways for power-seeking to be optimal, than for it not to be optimal. Colloquially, there are lots of ways for "get money and take over the world" to be part of an optimal policy, but relatively few ways for "die immediately" to be optimal. (And here, each "way something can be optimal" is a reward function which makes that thing optimal.)
But how strong is this effect, quantitatively?
Wait! to be optimal (in the undiscounted setting, where we don't care about intermediate states).In Environmental Structure Can Cause Instrumental Convergence [LW · GW], I speculated that we should be able to get quantitative lower bounds on how many objectives incentivize power-seeking actions:
Definition. At state , most reward functions incentivize action over action when for all reward functions , at least half of the orbit [LW · GW] agrees that has at least as much action value as does at state .
...
What does 'most reward functions' mean quantitatively - is it just at least half of each orbit? Or, are there situations where we can guarantee that at least three-quarters of each orbit incentivizes power-seeking? I think we should be able to prove that as the environment gets more complex, there are combinatorially more permutations which enforce these similarities, and so the orbits should skew harder and harder towards power-incentivization.
About a week later, I had my answer:
Scaling law for instrumental convergence (informal): if policy set lets you do " times as many things" than policy set lets you do, then for every reward function, A is optimal over B for at least of its permuted variants (i.e. orbit elements [LW · GW]).
For example, might contain the policies where you stay alive, and may be the other policies: the set of policies where you enter one of several death states.
(Conjecture which I think I see how to prove: for almost all reward functions, A is strictly optimal over B for at least of its permuted variants.)
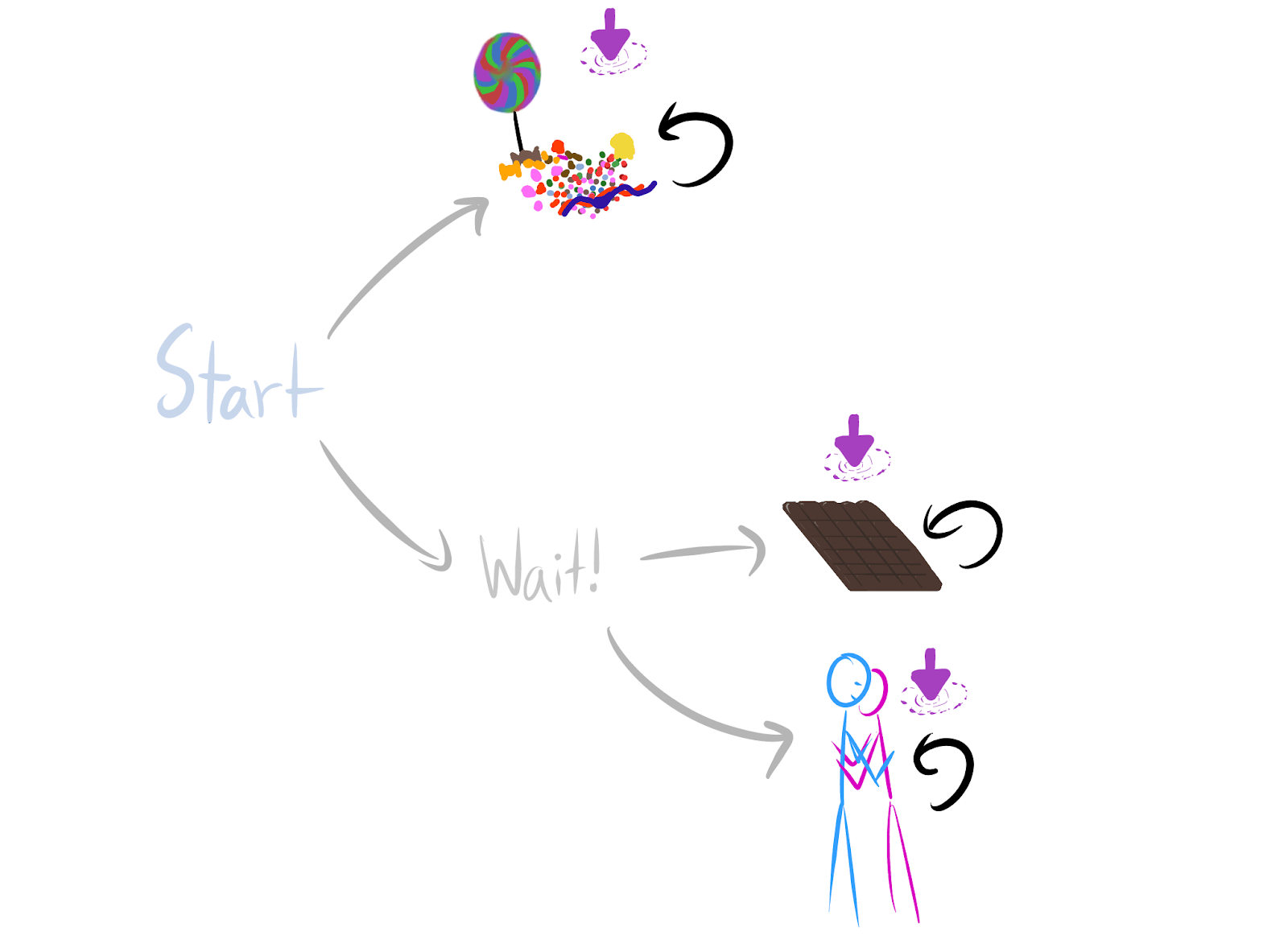
Wait! is optimal (for average per-timestep reward). That's because there are twice as many ways for Wait! to be optimal over candy, than for the reverse to be true.Basically, when you could apply the previous results [LW · GW], but "multiple times", you can get lower bounds on how often the larger set of things is optimal:
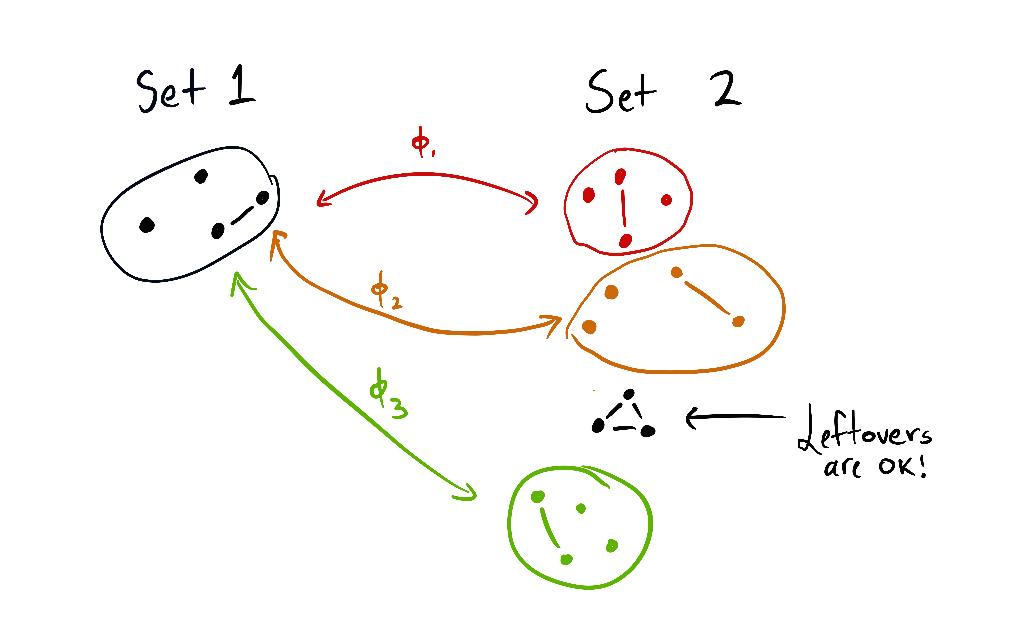
Roughly, the theorem says: if the set 1 of options can be embedded 3 times into another set 2 of options (where the images are disjoint), then at least of all variations on all reward functions agree that set 2 is optimal.
And in way larger environments - like the real world, where there are trillions and trillions of things you can do if you stay alive, and not much you can do otherwise - nearly all orbit elements will make survival optimal.
I see this theory as beginning to link the richness of the agent's environment, with the difficulty of aligning that agent: for optimal policies, instrumental convergence strengthens proportionally to the ratio of .
Why this is true
Optional section.
The proofs are currently in an Overleaf; let me know if you want access. But here's one intuition, using the candy/chocolate/reward example environment.
- Consider any reward function which says
candyis strictly optimal. - Then
candyis strictly optimal over bothchocolateandhug. - We have two permutations: one switching the reward for
candyandchocolate, and one switching reward forcandyandhug. - Each permutation produces a different orbit element (a different reward function variant).
- The permuted variants both agree that
Wait!is strictly optimal. - So there are at least twice as many orbit elements for which
Wait!is strictly optimal overcandy, than those for whichcandyis strictly optimal overWait!. - Either one of
Start's child states (candy/Wait!) is strictly optimal, or they're both optimal. If they're both optimal,Wait!is optimal. Otherwise,Wait!makes up at least of the orbit elements for which strict optimality holds.
Conjecture
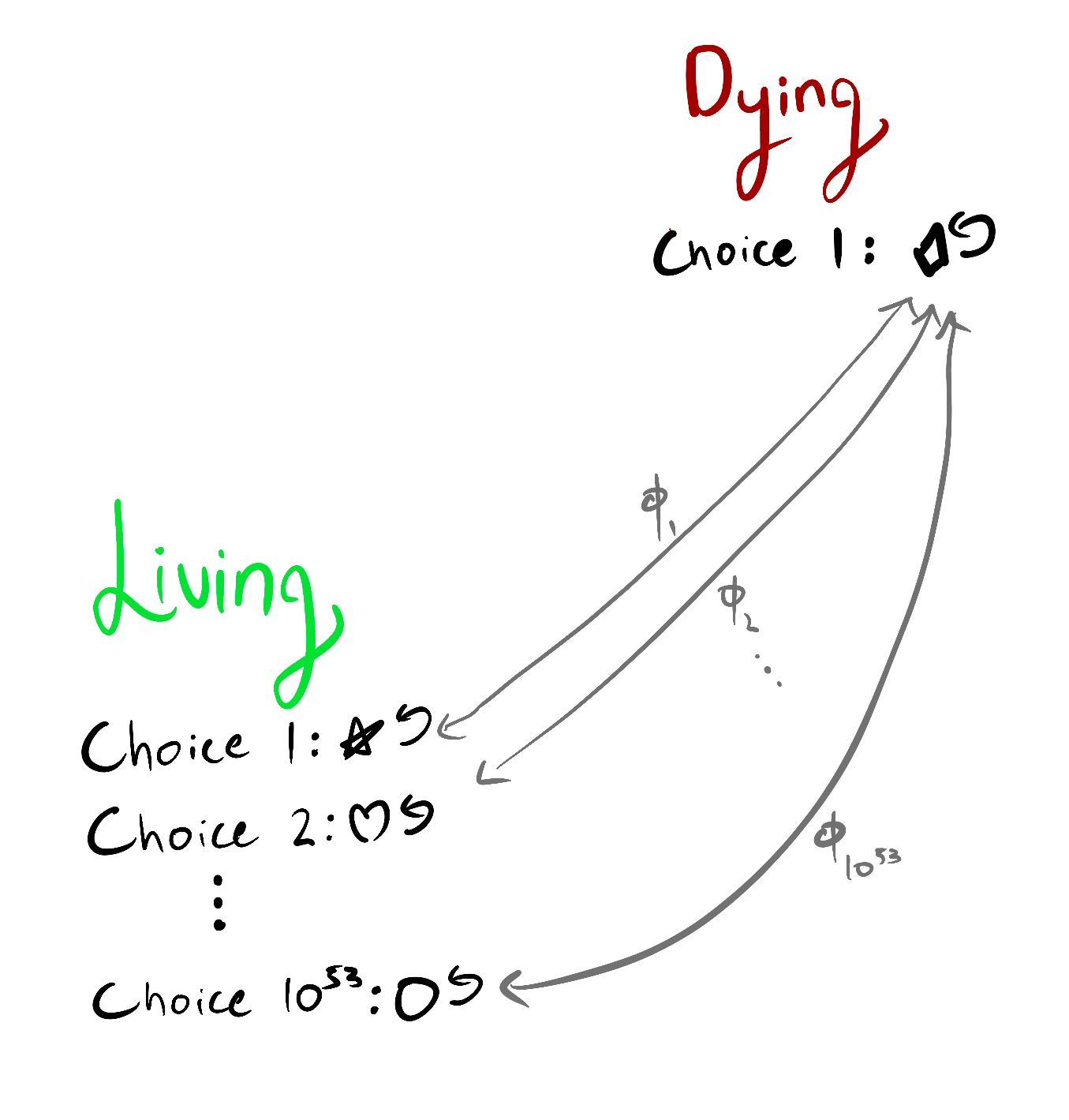
Fractional scaling law for instrumental convergence (informal): if staying alive lets you do "things" and dying lets you do "things", then for every reward function, staying alive is optimal for at least of its orbit elements.
I'm reasonably confident this is true, but I haven't worked through the combinatorics yet. This would slightly strengthen the existing lower bounds in certain situations. For example, suppose dying gives you 2 choices of terminal state, but living gives you 51 choices. The current result only lets you prove that at least of the orbit incentivizes survival. The fractional lower bound would slightly improve this to .
Invariances
In certain ways, the results are indifferent to e.g. increased precision in agent sensors: it doesn't matter if dying gives you 1 option and living gives you options, or if dying gives you 2 options and living gives you options.
Wait! has twice as many ways of being average-optimal.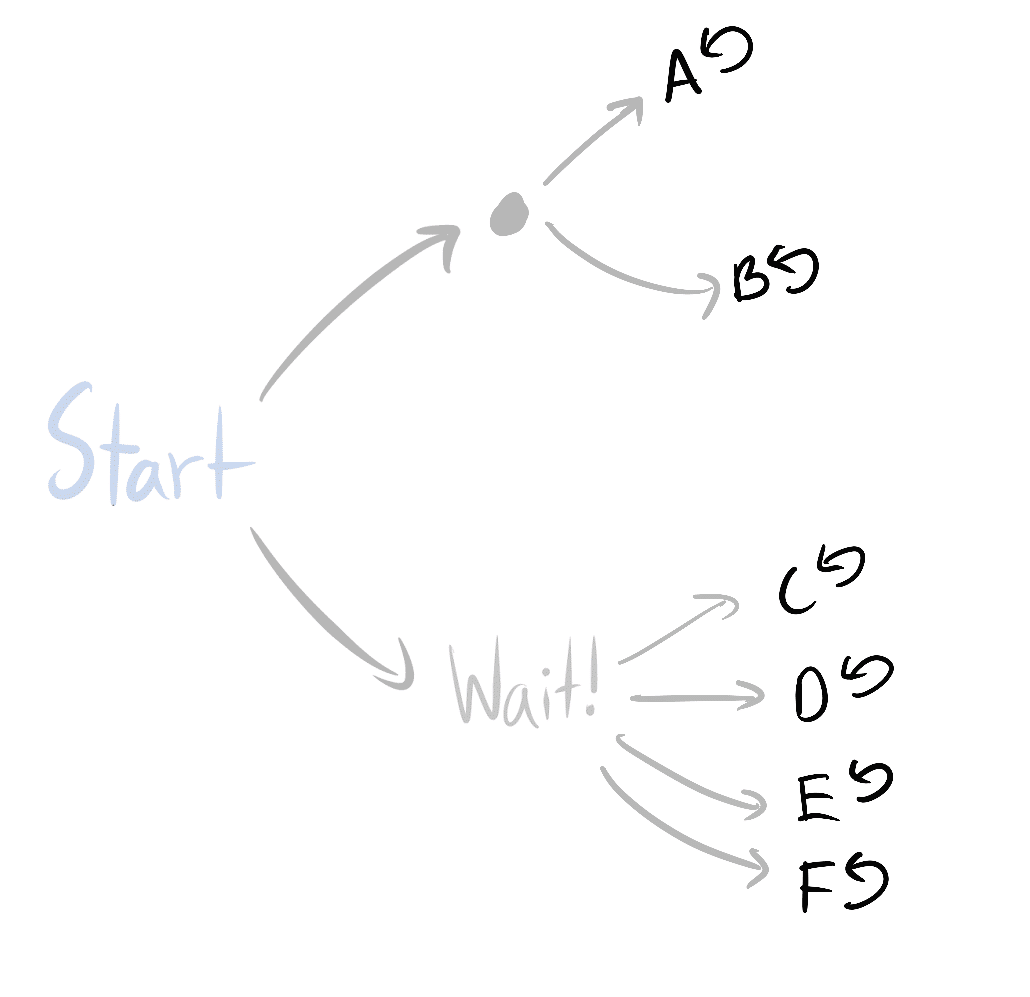
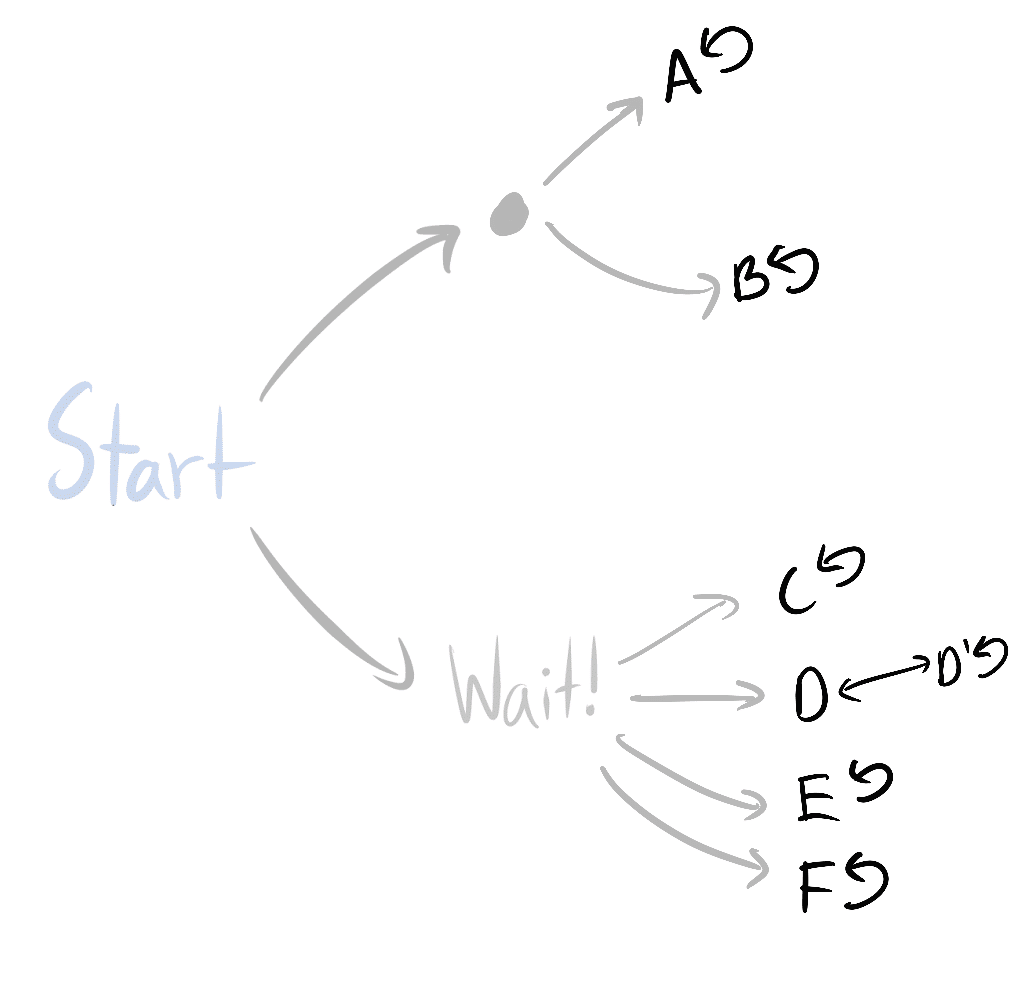
Wait! has at least twice as many ways of being average-optimal.Similarly, you can do the inverse operations to simplify subgraphs in a way that respects the theorems.
This is the start of a theory on what state abstractions "respect" the theorems, although there's still a lot I don't understand there. (I've barely thought about it so far.)
Note of caution, redux
Last time, in addition to the "how do combinatorics work? [LW · GW]" question I posed, I wrote several qualifications:
- They assume the agent is following an optimal policy for a reward function
- I can relax this to -optimality, but may be extremely small
- They assume the environment is finite and fully observable
- Not all environments have the right symmetries
- But most ones we think about seem to
- The results don't account for the ways in which we might practically express reward functions
- For example, often we use featurized reward functions. While most permutations of any featurized reward function will seek power in the considered situation, those permutations need not respect the featurization (and so may not even be practically expressible).
- When I say "most objectives seek power in this situation", that means in that situation - it doesn't mean that most objectives take the power-seeking move in most situations in that environment
- The combinatorics conjectures will help prove the latter
Let's take care of that last one. I was actually being too cautious, since the existing results already show us how to reason across multiple situations. The reason is simple: suppose we use my results to prove that when the agent maximizes average per-timestep reward, it's strictly optimal for at least 99.99% of objective variants to stay alive. This is because the death states are strictly suboptimal for these variants. For all of these variants, no matter the situation the agent finds itself in, it'll be optimal to try to avoid the strictly suboptimal death states.
This doesn't mean that these variants always incentivize moves which are formally POWER-seeking, but it does mean that we can sometimes prove what optimal policies tend to do across a range of situations.
So now we find ourselves with a slimmer list of qualifications:
- They assume the agent is following an optimal policy for a reward function
- I can relax this to -optimality, but may be extremely small
- They assume the environment is finite and fully observable
- Not all environments have the right symmetries
- But most ones we think about seem to
- The results don't account for the ways in which we might practically express reward functions
- For example, state-action versus state-based reward functions (this particular case doesn't seem too bad, I was able to sketch out some nice results rather quickly, since you can convert state-action MDPs into state-based reward MDPs and then apply my results).
It turns out to be surprisingly easy to do away with (2). We'll get to that next time.
For (3), environments which "almost" have the right symmetries should also "almost" obey the theorems. To give a quick, non-legible sketch of my reasoning:
For the uniform distribution over reward functions on the unit hypercube (), optimality probability should be Lipschitz continuous on the available state visit distributions (in some appropriate sense). Then if the theorems are "almost" obeyed, instrumentally convergent actions still should have extremely high probability, and so most of the orbits still have to agree.
So I don't currently view (3) as a huge deal. I'll probably talk more about that another time.
This should bring us to interfacing with (1) ("how smart is the agent? How does it think, and what options will it tend to choose?" - this seems hard) and (4) ("for what kinds of reward specification procedures are there way more ways to incentivize power-seeking, than there are ways to not incentivize power-seeking?" - this seems more tractable).
Conclusion
This scaling law deconfuses me about why it seems so hard to specify nontrivial real-world objectives which don't have incorrigible shutdown-avoidance incentives when maximized.
FN quotes: I'm using scare quotes regularly because there aren't short English explanations for the exact technical conditions. But this post is written so that the high-level takeaways should be right.
Thanks to Connor Leahy, Rohin Shah, Adam Shimi, and John Wentworth for feedback on this post.
7 comments
Comments sorted by top scores.
comment by Slider · 2021-07-11T19:59:23.778Z · LW(p) · GW(p)
As I understand expanding candy into A and B but not expanding the other will make the ratios go differently.
In probablity one can have the assumtion of equiprobability, if you have no reason to think one is more likely than other then it might be reaosnable to assume they are equally likely.
If we knew what was important and what not we would be sure about the optimality. But since we think we don't know it or might be in error about it we are treating that the value could be hiding anywhere. It seems to work in a world where each node is pretty comparably likely to contain value. I guess it comes from the effect of the relevant utility functions being defined in the terms of states we know about.
Replies from: TurnTrout↑ comment by TurnTrout · 2021-07-12T15:25:59.750Z · LW(p) · GW(p)
As I understand expanding candy into A and B but not expanding the other will make the ratios go differently.
What do you mean?
If we knew what was important and what not we would be sure about the optimality. But since we think we don't know it or might be in error about it we are treating that the value could be hiding anywhere.
I'm not currently trying to make claims about what variants we'll actually be likely to specify, if that's what you mean. Just that in the reasonably broad set of situations covered by my theorems, the vast majority of variants of every objective function will make power-seeking optimal.
Replies from: Slider↑ comment by Slider · 2021-07-12T16:03:03.488Z · LW(p) · GW(p)
In "Invariances" picture 1 doesn't have any letter outcomes. In picture 2 there are outcomes a,b,c,d,e,f. However if one had a,b and not c,d,e,f (but instead bar and hug) then the tree would look symmetrical. It feels like the argument is assuming that if we have different level of possible detail level the detail is approximately equal across the modeled universe. It would seem if one has a more detailed ("gear level") model of one part and more approximate ("here be dragons") kind of model for another one, the importance of the understood part will overwhelm.
Replies from: TurnTroutcomment by Dagon · 2021-07-11T18:06:38.483Z · LW(p) · GW(p)
I wonder if you can (or should) make "power-seeking" a multidimensional factor - seeking power over some aspects of action and not needing it for others. To the extent that an agent is aligned with another, the power relationship is irrelevant - they're working together to seek the same states of the universe anyway.
In other words, "power" is really just the ability to enforce some amount of behavioral alignment on others. Power-seeking is obviously useful in a sea of unaligned humans, as you can force them to act more like how they would if they were aligned with you.
Edit: Thanks for pointing out my misunderstanding, Pattern. I mistakenly took "power-seeking" to mean mostly social power, rather than general prediction/optimization power.
Replies from: Pattern, TurnTrout↑ comment by Pattern · 2021-07-12T03:15:22.898Z · LW(p) · GW(p)
Depending on how people operate, (more) alignment could have the same effect.
really just the ability to enforce some amount of behavioral alignment on others.
No, it's not. If you have a watch, that might give you more power (like the ability to know synchronize your actions with schedules (like when trains are)) if you don't already have a watch. But the power of the watch is not "really just the ability to [control] others". It's just a watch.
↑ comment by TurnTrout · 2021-07-12T16:05:29.600Z · LW(p) · GW(p)
In my reading about the various usages of 'power', there are indeed definitions which focus on exerting control through other agents. I think in many situations, this is a useful frame, but I find "ability to achieve goals in general" to be both broader and also upstream of "ability to control others to achieve your goals."
(also - upvoted for asking a question and then editing to acknowledge a misunderstanding!)