LeCun’s “A Path Towards Autonomous Machine Intelligence” has an unsolved technical alignment problem
post by Steven Byrnes (steve2152) · 2023-05-08T19:35:19.180Z · LW · GW · 37 commentsContents
Summary 1. Background: the paper’s descriptions of the “Intrinsic Cost module” 2. As described in the paper, several components of the AI’s Intrinsic Cost are directly opposed to AI controllability and prosociality 3. As described in the paper, the components of the AI’s Intrinsic Cost that are supposed to motivate intrinsic kindness, are unlikely to actually work 4. Conclusion Epilogue: We need to do better than a cursory treatment of this technical problem, even in the context of a very-early-stage speculative vision paper None 37 comments
Summary
- This post is about the paper A Path Towards Autonomous Machine Intelligence (APTAMI) by Yann LeCun. It’s a high-level sketch of an AI architecture inspired by the brain.
- APTAMI is mostly concerned with arguing that this architecture is a path towards more-capable AI. However, it is also claimed (both in the paper itself and in associated public communication) that this architecture is a path towards AI that is “controllable and steerable”, kind, empathetic, and so on.
- I argue that APTAMI is in fact, at least possibly, a path towards that latter destination, but only if we can solve a hard and currently-unsolved technical problem.
- This problem centers around the Intrinsic Cost module, which performs a role loosely analogous to “innate drives” in humans—e.g. pain being bad, sweet food being good, a curiosity drive, and so on.
- APTAMI does not spell out explicitly (e.g. with pseudocode) how to create the Intrinsic Cost module. It offers some brief, vague ideas of what might go into the Intrinsic Cost module, but does not provide any detailed technical argument that an AI with such an Intrinsic Cost would be controllable / steerable, kind, empathetic, etc.
- I will argue that, quite to the contrary, if we follow the vague ideas in the paper for building the Intrinsic Cost module, then there are good reasons to expect the resulting AI to be not only unmotivated by human welfare, but in fact motivated to escape human control, seek power, self-reproduce, etc., including by deceit and manipulation.
- Indeed, it is an open technical problem to write down any Intrinsic Cost function (along with training environment and other design choices) for which there is a strong reason to believe that the resulting AI would be controllable and/or motivated by human welfare, while also being sufficiently competent to do the hard intellectual tasks that we’re hoping for (e.g. human-level scientific R&D).
- I close by encouraging LeCun himself, his colleagues, and anyone else to try to solve this open problem. It’s technically interesting, very important, and we have all the information we need to start making progress now. I've been working on that problem myself for years, and I think I’m making more than zero progress, and if anyone reaches out to me I’d be happy to discuss the current state of the field in full detail.
- …And then there’s an epilogue, which steps away from the technical discussion of the Intrinsic Cost module, and instead touches on bigger-picture questions of research strategy & prioritization. I will argue that the question of AI motivations merits much more than the cursory treatment that it got in APTAMI—even given the fact that APTAMI was a high-level early-stage R&D vision paper in which every other aspect of the AI is given an equally cursory treatment.
(Note: Anyone who has read my Intro to Brain-Like AGI Safety series [? · GW] will notice that much of this post is awfully redundant with it—basically an abbreviated subset with various terminology changes to match the APTAMI nomenclature. And that’s no coincidence! As mentioned, the APTAMI architecture was explicitly inspired by the brain.)
1. Background: the paper’s descriptions of the “Intrinsic Cost module”
For the reader’s convenience, I’ll copy everything specific that APTAMI says about the Intrinsic Cost module. (Emphasis in original.)
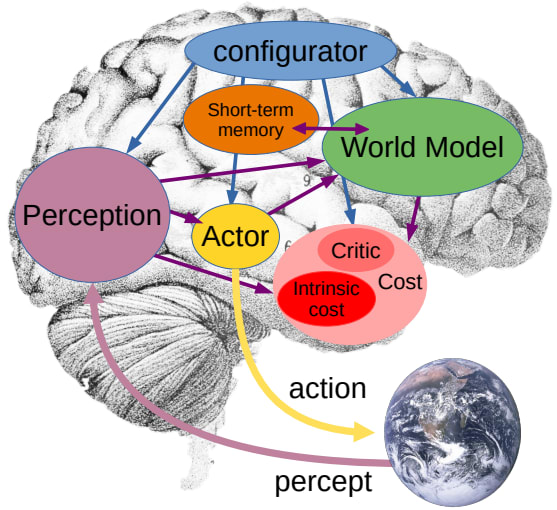
PAGES 7-8: The Intrinsic Cost module is hard-wired (immutable, non trainable) and computes a single scalar, the intrinsic energy that measures the instantaneous “discomfort” of the agent – think pain (high intrinsic energy), pleasure (low or negative intrinsic energy), hunger, etc. The input to the module is the current state of the world, produced by the perception module, or potential future states predicted by the world model. The ultimate goal of the agent is minimize the intrinsic cost over the long run. This is where basic behavioral drives and intrinsic motivations reside. The design of the intrinsic cost module determines the nature of the agent’s behavior. Basic drives can be hard-wired in this module. This may include feeling “good” (low energy) when standing up to motivate a legged robot to walk, when influencing the state of the world to motivate agency, when interacting with humans to motivate social behavior, when perceiving joy in nearby humans to motivate empathy, when having a full energy [supply] (hunger/satiety), when experiencing a new situation to motivate curiosity and exploration, when fulfilling a particular program, etc. Conversely, the energy would be high when facing a painful situation or an easily-recognizable dangerous situation (proximity to extreme heat, fire, etc), or when wielding dangerous tools. The intrinsic cost module may be modulated by the configurator, to drive different behavior at different times.
PAGE 14: The intrinsic cost module (IC) is where the basic behavioral nature of the agent is defined. It is where basic behaviors can be indirectly specified.
For a robot, these terms would include obvious proprioceptive measurements corresponding to “pain”, “hunger”, and “instinctive fears”, measuring such things as external force overloads, dangerous electrical, chemical, or thermal environments, excessive power consumption, low levels of energy reserves in the power source, etc.
They may also include basic drives to help the agent learn basic skills or accomplish its missions. For example, a legged robot may comprise an intrinsic cost to drive it to stand up and walk. This may also include social drives such as seeking the company of humans, finding interactions with humans and praises from them rewarding, and finding their pain unpleasant (akin to empathy in social animals). Other intrinsic behavioral drives, such as curiosity, or taking actions that have an observable impact, may be included to maximize the diversity of situations with which the world model is trained (Gottlieb et al., 2013).
The IC can be seen as playing a role similar to that of the amygdala in the mammalian brain and similar structures in other vertebrates.
To prevent a kind of behavioral collapse or an uncontrolled drift towards bad behaviors, the IC must be immutable and not subject to learning (nor to external modifications).
PAGE 44: What is the substrate of emotions in animals and humans? Instantaneous emotions (e.g. pain, pleasure, hunger, etc) may be the result of brain structures that play a role similar to the Intrinsic Cost module in the proposed architecture. Other emotions such as fear or elation may be the result of anticipation of outcome by brain structures whose function is similar to the Trainable Critic.
The presence of a cost module that drives the behavior of the agent by searching for optimal actions suggests that autonomous intelligent agents of the type proposed here will inevitably possess the equivalent of emotions. In an analogous way to animal and humans, machine emotions will be the product of an intrinsic cost, or the anticipation of outcomes from a trainable critic.
2. As described in the paper, several components of the AI’s Intrinsic Cost are directly opposed to AI controllability and prosociality
In AI alignment discourse, we often talk about “instrumental convergence” [? · GW]. If an AI really wants a thing X, then for almost any X, it will find it instrumentally useful (i.e., useful as a means to an end) to get control over its situation, gain power and resources, stay alive, prevent its desires from being exogenously changed, and so on. In Stuart Russell’s memorable quip, if an AI really wants to fetch the coffee, well, “you can’t fetch the coffee when you’re dead”, so the AI will fight for self-preservation (other things equal).
APTAMI specifically mentioned “hunger”, “pain”, and “curiosity” as three likely components of Intrinsic Cost (see Section 1 excerpts). All three of these have obvious “instrumental convergence” issues. Let’s go through them one at a time:
- If an AI is motivated to avoid hunger (say, implemented in source code by checking the battery charge state), and the AI reasons that humans might not want to recharge it, then the AI will be motivated to get power and control over its situation to eliminate that potential problem, e.g. by sweet-talking the humans into recharging it, or better yet maneuvering into a situation where it can recharge itself without asking anyone’s permission.
- If an AI is motivated to avoid pain, and the AI reasons that humans might cause it to experience pain, or be unable or unwilling to help it avoid future pain, then the AI will likewise be motivated to get power and control over its situation to eliminate that potential problem.
- If an AI is motivated by curiosity, and the AI reasons that humans might fail to offer it sufficiently novel and interesting things to do, then the AI will likewise be motivated to get power and control over its situation, so that it can go satisfy its curiosity without asking anyone’s permission.
Possible reply 1: “OK, granted, that’s a real problem, but it’s easy to fix, we’ll just remove those three things from the Intrinsic Cost module.”
My response: It’s not so easy. For one thing, curiosity in particular is plausibly essential for the AI to work at all. For another thing, as mentioned at the top, it’s not just about these three specific motivations. On the contrary, a wide variety of motivations lead to similar “instrumental convergence” problems, including important motivations like “wanting to design a better solar cell” that seem necessary for the AIs to do the things we want them to do.
Possibly reply 2: “Humans are motivated by hunger, pain, and curiosity, and can be perfectly lovely assistants and employees. Why would we be starving and hurting the AIs anyway?? Let’s just treat our AIs well!!”
My response: Humans have a lot of other motivations besides hunger, pain, and curiosity, including intrinsic motivations to kindness, friendship, norm-following, and so on. I’ll turn to those in the next section. If you’ve ever gotten to know a sociopath or narcissist, you'll know that they have hunger, pain, and curiosity too, but it is absolutely not the case that if you just treat them with kindness then they will be kind to you in return! They might act kind and cooperative as a means to an end, e.g. to gain your trust, but that’s not what we want—that’s the kind of “cooperation” where they stab you in the back as soon as the situation changes. We want our AIs to treat kindness as an end in itself. And that doesn’t happen unless we explicitly build such an intrinsic motivation into them. So let’s turn to that next.
3. As described in the paper, the components of the AI’s Intrinsic Cost that are supposed to motivate intrinsic kindness, are unlikely to actually work
Before we even start, it seems like a pretty dicey plan to build an AI that has numerous innate drives that are opposed to controllability and prosociality (as described in the previous section), plus other innate drives that advance controllability and prosociality (as I’ll discuss in this section). Such an AI would feel “torn”, so to speak, when deciding whether to advance its own goals versus humans’. We can hope that the prosocial drives will “win out” in the AI’s reckoning, but we don’t have any strong reason to expect that they will in fact win out. Neurotypical humans are a fine illustration—we have both prosocial drives and selfish drives, and as a result, sometimes humans do nice things, and also sometimes humans advance their own interests at the expense of others.
However, it’s much worse than that, because I claim we don’t know how to build prosocial innate drives at all in this kind of AI.
It’s clearly possible in principle—there’s some mechanism underpinning those drives inside the brains of non-psychopathic humans—but I claim it’s an open problem how these drives actually work.
(Or in APTAMI’s terminology, it’s an open problem exactly what code to put into the Intrinsic Cost module such that the AI will have any prosocial or docile motivations at all.)
APTAMI’s “proposal” here is really just a passing description in a few sentence fragments. But worse than that, as best as I can tell, this cursory description is not pointing towards a viable proposal, nor one that can be easily remedied.
I’ll repeat the relevant excerpts from above:
This may include feeling “good” (low energy) … when interacting with humans to motivate social behavior, when perceiving joy in nearby humans to motivate empathy, …
… This may also include social drives such as seeking the company of humans, finding interactions with humans and praises from them rewarding, and finding their pain unpleasant (akin to empathy in social animals).
It’s hard to respond to this because it’s so vague. Different things can go wrong depending on how the implementation is supposed to work in detail. I can make some guesses, but maybe the response will be “No you moron, that’s not what I meant”. Oh well, I’ll proceed anyway. If what I say below isn’t what the author had in mind, maybe he can share what he did have in mind, and then I can revise my description of what I think the problems are, and maybe we can have a productive back-and-forth.
My attempt to flesh out what LeCun might have in mind:
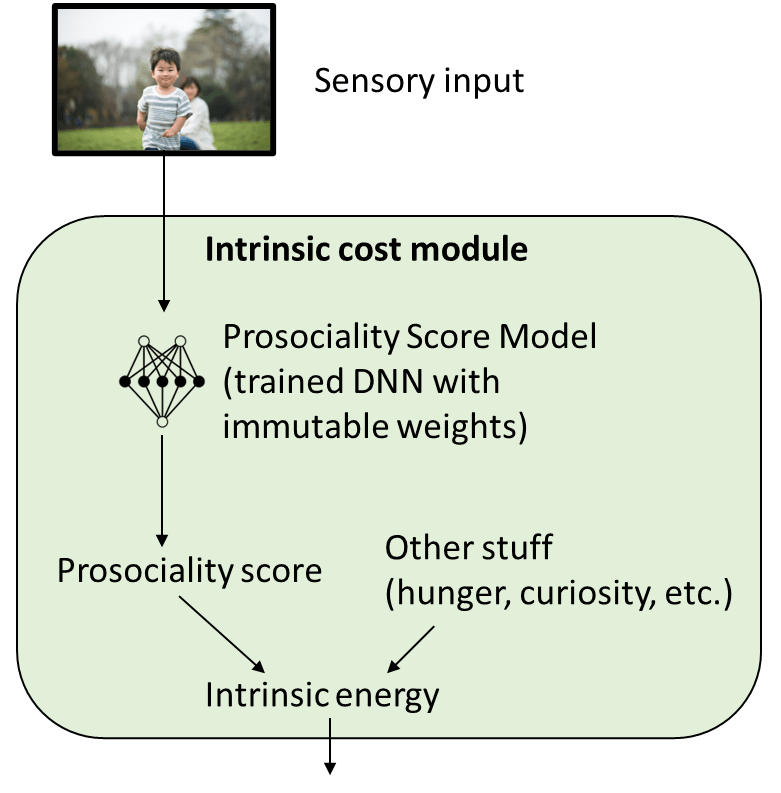
The robot has “eyes” & “ears” (a video feed with sound). We get some early test data of the robot doing whatever (say, flailing around randomly), and then send the video feed to a bunch of humans (say, Mechanical Turkers) to manually label the video frames using the following rubric (drawn from the excerpts above):
- “Am I interacting with humans?” (1-10)
- “Are nearby humans experiencing joy?” (1-10)
- “Am I in the company of humans?” (1-10)
- “Is a human praising me right now?” (1-10)
- “Is a human in pain right now?” (1-10)
Next, we do a weighted average of these scores (the first four with positive weight, the fifth with negative weight) and use supervised learning to train an ML model that can take any arbitrary video frame and assign it a score. Let’s call this trained deep neural net (DNN) the Prosociality Score Model. We freeze the weights of this classifier and put it inside the Intrinsic Cost module (to be added to the other terms like pain and curiosity, discussed above). Here we are so far:
Does this approach actually make an AI with prosocial motivations? I think the answer is a clear “no”.
For starters, suppose the AI straps lots of humans into beds, giving them endless morphine and heroin IV drips, and the humans get into such a state of delirium that they repeatedly praise and thank the AI for continuing to keep the heroin drip turned on.
This dystopian situation would be, to the AI, absolute ecstasy—much like the heroin to those poor humans. The Prosicality Score Model would (perhaps—see below) give
- 10/10 for “interacting with humans”,
- 10/10 for “being near humans experiencing joy”,
- 10/10 for “being in the company of humans”,
- 10/10 for “receiving praise”, and
- 0/10 for “being around humans in pain”.
Now, it doesn’t immediately follow that the AI will actually want to start buying chair-straps and heroin, for a similar reason as why I personally am not trying to get heroin right now. But it certainly raises that kind of AI behavior as a salient possibility, and in this particular instance my guess is that something in this general class of “failures” would be pretty likely to actualize. At the very least, I see no strong reason to believe that they won’t actualize.
On a more technical level, we face (among other things) the classic problem of out-of-distribution (OOD) generalization, and we face it not once but twice:[1]
- Out-of-distribution generalization problem 1: How does the Prosociality Score Model generalize from the supervised (human-labeled) examples to the AI’s future perceptions—which might be far outside that training distribution?
- Out-of-distribution generalization problem 2: How does the critic generalize from its past observations of Intrinsic Cost to estimate the Intrinsic Cost of future plans and situations—which, again, might be far outside the distribution of its past experience?
These problems are made worse because they are adversarial—with the adversary being the AI itself! Let me explain this adversarial aspect via some toy examples:
Why is problem 1 an “adversarial” OOD problem? Here’s a toy example. The AI might notice that it finds it pleasing to watch movies of happy people—because doing so spuriously triggers the Prosociality Score Model. Then the AI might find itself wanting to make its own movies to watch. As the AI fiddles with the settings in iMovie, it might find that certain texture manipulations make the movie really really pleasing to watch on loop—because it “tricks” the Prosociality Score Model into giving anomalously high scores.
What happened here was that the AI sought out and discovered “adversarial examples” for an immutable DNN buried deep inside its own “mind”.
(That particular example doesn’t seem very scary, until the AI notices that humans might want to turn off its weird-texture movie playing on loop. Then the situation gets “adversarial” in the more literal sense!)
Why is problem 2 an “adversarial” OOD problem? Here’s a toy example. Imagine that the AI is deciding what to do, out of a very wide possibility space. For example, once we get AIs that can invent new technology, then the AI has access to actions that might wildly change the world compared to anything in history. Thus, if there are any anomalies where the critic judges a weird course-of-action as unusually low-intrinsic-cost, then we’re in a situation where the AI’s brainstorming process is actively seeking out such anomalies.
(From our human perspective, we would say “this plan is exploiting an anomalous edge-case in the critic”. Whereas from the AI’s perspective, it would say, “this plan is a clever awesome out-of-the-box way to solve every problem!!” You say tomato, I say to-mah-to.[2])
Needless to say, robustness to adversarially-chosen wildly-out-of-distribution inputs is an unsolved problem in ML. So it’s probably safe to assume that, if we use the APTAMI plan (as I interpret it), the AI is probably going to wind up with weird and a-priori-unpredictable motivations. And this problem is not the kind of problem where we can just straightforwardly patch it once we have a reproducible test case running on our computers.
4. Conclusion
In Section 2 I argued that the AI (as described in APTAMI) will have at least some motivations (like hunger, pain, and curiosity) that run directly counter to controllability / steerability / prosociality, thanks to “instrumental convergence” [? · GW]. This might be OK if the AI also has other motivations that create controllability / steerability / prosociality (as is the case in humans, who are sometimes cooperative despite some selfish innate drives).
However, in Section 3 I argued that it's an open problem to write out an Intrinsic Cost function that will lead to any motivation for controllability / steerability / prosociality, and that APTAMI says only a few words about how to solve this problem, and that what little it says does not seem to be pointing in a promising direction. Instead, the paper's proposal seems likely to lead to AIs with weird and a-priori-unpredictable motivations. Indeed, I’d guess that these weird unpredictable motivations are more likely to contribute to “instrumental convergence” effects than to push against them. And this problem would be very difficult to patch even if we had a working minimal test case on our computers, because wildly-out-of-distribution adversarial robustness is an open problem in ML, and there is no obvious better alternative approach.
So we have a very interesting, open technical problem here: “Exactly what code should we put into the Intrinsic Cost module [in conjunction with other design choices, e.g. training environment], such that we have strong reason to believe that we’ll be pleased with the AI that results?” In fact, I myself have a full-time job in which I spend most of my days trying to work towards an answer to this question, and have been doing so for years. It is a very hard problem.
I think that LeCun himself is more qualified than most to work on this technical problem, and I think we already have all the information we need to make progress, so I would strongly encourage him and his colleagues to dive in. I humbly offer my Intro to Brain-Like AGI Safety series [? · GW] as a potentially useful starting point / resource in this context, since LeCun and I share many assumptions about what autonomous machine intelligence will look like, and hence I imagine he’d find it somewhat less difficult to relate to than most AI alignment documents. And I would be happy to chat more! :)
Epilogue: We need to do better than a cursory treatment of this technical problem, even in the context of a very-early-stage speculative vision paper
OK, if you’ve read this far, then maybe you’re thinking something along the following lines:
So, Yann LeCun published a self-described ‘position paper’ expressing a ‘vision for a path towards intelligent machines’. He was explicitly intending to spur discussion and solicit feedback, even posting it on openreview.net rather than arxiv. And now this other guy, Steve Byrnes, has written a blog post saying that one aspect of the vision is more complicated and difficult to get right than implied by the very brief paper discussion.
Umm, yeah, duh. Everything in the paper’s proposed architecture is more complicated and difficult to get right than the corresponding very brief paper discussion. It’s a vision paper, not a technical blueprint. And the paper was written to solicit feedback, and it evidently succeeded, because now I’m reading a blog post that is giving feedback. And meanwhile, while the blog post suggested that there is an open problem that needs to be solved, everyone seems to be in agreement that a solution to that problem probably exists—since after all we’re talking about a path to a brain-like AI architecture, and humans have brains, and humans can be nice and cooperative sometimes.
So, kudos all around. This is a good and healthy R&D process. Everything is fine.
I disagree—I think that if you were nodding along with the above paragraphs then you have lost sight of something very important.
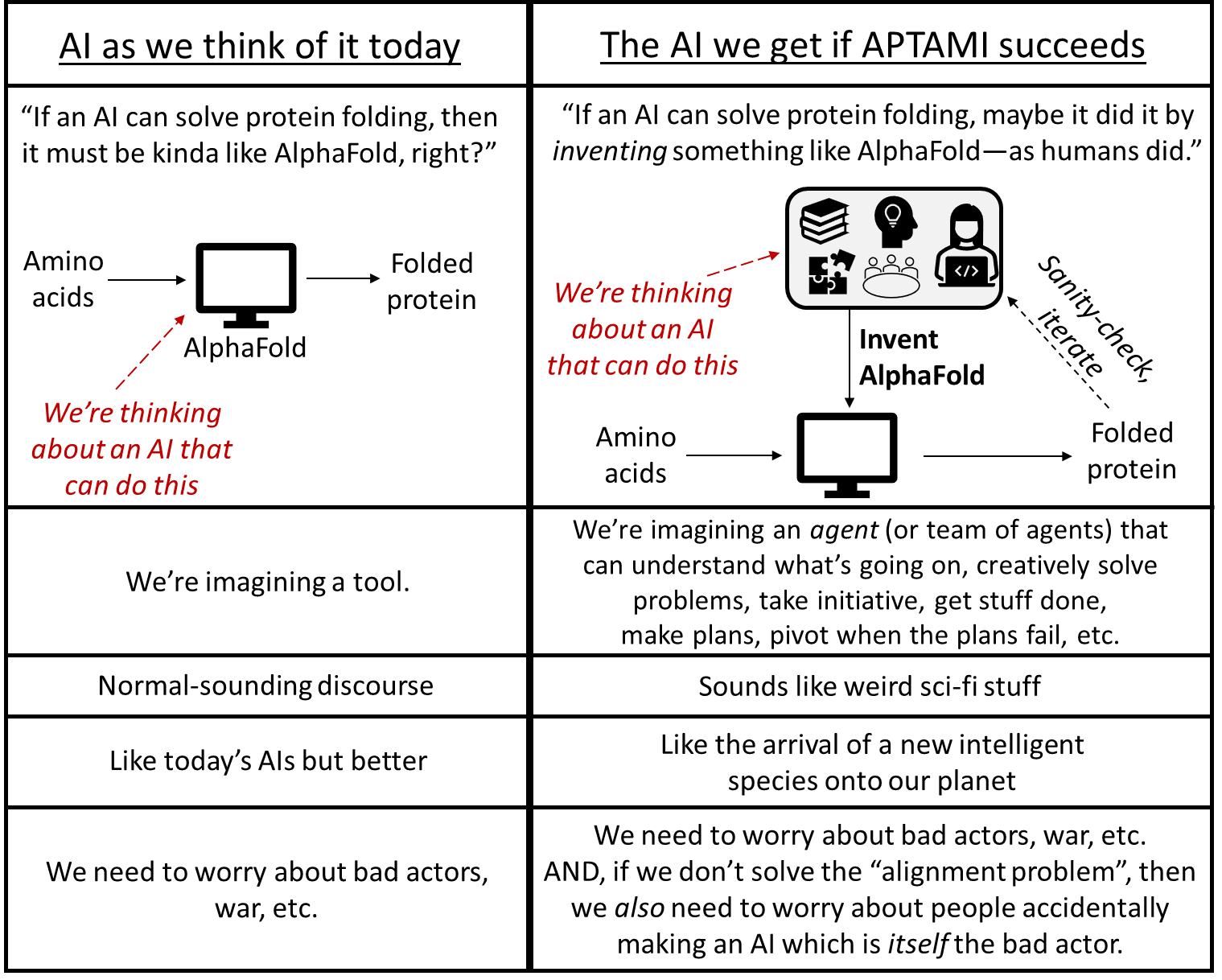
APTAMI is an attempt to describe a path towards powerful AI—AI that can understand the world, get things done, figure things out, make plans, pivot when the plans fail, build tools to solve their problems, and so on—all the things that would make us think of the AIs intuitively as “a new intelligent species” rather than “an AI system as we think of it today”.
Suppose someone published a position paper describing “a vision for a path towards using bioengineering to create a new intelligent nonhuman species”. And suppose that the question of how to make this new species care about humans and/or stay under human control is relegated to a vague and cursory discussion in a few sentences, and close examination reveals that if we were to follow the advice in those few sentences then we would probably get a highly-intelligent nonhuman species pursuing its own interests with callous disregard for human welfare—somewhat akin to a species of high-functioning sociopaths.
If that someone says “Yeah sure, obviously there are still lots of details to work out”, then I would respond: “No no no! The question of how to design this new species such that they will be docile and/or intrinsically care about human welfare is not just one of many technical details to be worked out! This is the kind of problem where we halt all other work on this research program until we have sorted this out.”
That seems like common sense to me. If not, consider:
- For one thing, we don’t actually know for sure that this technical problem is solvable at all, until we solve it. And if it’s not in fact solvable, then we should not be working on this research program at all. If it's not solvable, the only possible result of this research program would be “a recipe for summoning demons”, so to speak. And if you’re scientifically curious about what a demon-summoning recipe would look like, then please go find something else to be scientifically curious about instead.
- Now, in the case at hand, it’s a decent argument to say “humans are sometimes nice, therefore it’s probably possible in principle to make brain-like AIs that are nice”—indeed, I often make that argument myself. But it’s not a strong argument, let alone air-tight. For example, for all I know right now, maybe making a nice human requires a “training environment” that entails growing up with a human body, in a human community, at human speed. Doing that with AI is not really feasible in practice, for many reasons. And that’s just one example problem among many.
- For another thing, this technical alignment problem could be the kind of technical problem that takes a long time to solve, even assuming we have the benefit of trial-and-error. If we make progress on every other aspect of the research program first, while taking a “we’ll cross that bridge when we get to it” attitude on how exactly to code up the Intrinsic Cost module, then we could wind up in a situation where we have discovered (perhaps even open-sourced) a recipe for building self-interested AIs with callous disregard for humanity, but we have not yet discovered any analogous recipe for building friendly powerful AIs that might help us and fight on our side. That’s a bad situation. And we can avoid that situation by doing the requisite research in the right order.
- Finally, if Yann LeCun were merely treating this open technical problem in a cursory way, and proposing approaches that are technically flawed upon close scrutiny, then that would at least be somewhat understandable. I myself propose technically-flawed plans all the time! A bigger issue is that LeCun, in his public statements, gives a strong impression that he is opposed to people working on this technical problem. If my impression here is wrong—if LeCun in fact thinks that the open technical problem described in this post is a worthwhile thing for AI researchers to be working on—then I appeal to him to directly and straightforwardly say that. It would make a huge difference.
(Thanks Christopher King, Roman Leventov, & Justis Mills for critical comments on earlier drafts.)
- ^
I note that these two out-of-distribution problems correspond respectively with [aspects of] what I call “outer alignment” and “inner alignment” in this post [LW · GW]. “Outer alignment” (in this context) is the question “Is the Intrinsic Cost module returning high vs low intrinsic energy outputs in a way that tracks the extent to which the agent is doing things that it was intended to do?” And “inner alignment” (in this context) is the question “When the AI imagines some possible future plan, does the plan seem appealing / unappealing to the AI in a way that actually tracks its expected future Intrinsic Cost?” By the way, as discussed at that link, it’s not necessarily the case that the best way to get good AI behavior is to separately solve both these out-of-distribution generalization problems; for example, if we have sufficient neural network interpretability of the trained critic, then we get to slice through both layers, bridging directly from the design intentions to the AI’s motivations, without relying on the Intrinsic Energy function being perfect.
- ^
Maybe you’re thinking: “OK, we’ll design the AI such that, if something seems like an out-of-the-box idea, then the AI doesn’t want to do it. The AI wants to stay in the box!” Or in conventional ML terms, if we’re worried about out-of-distribution problems, then we can just put in a penalty term that makes the AI want to stay in-distribution. I do actually think there’s a kernel of a promising research direction here, but I don’t know how to flesh it out into a plausible plan. In particular, the most obvious approaches along these lines would have an unintended side-effect of crippling the AI’s ability to learn new things, make new connections, do R&D, etc. Further discussion in Section 14.4 here [LW · GW].
37 comments
Comments sorted by top scores.
comment by tailcalled · 2023-05-08T20:33:22.922Z · LW(p) · GW(p)
Nice, I was actually just thinking that someone needed to respond to LeCun's proposal.
That said, I think you may have gotten some of the details wrong. I don't think the intrinsic cost module gets raw sensory data as input, but instead it gets input from the latent variables of the world model as well as the self-supervised perception module. This complicates some of the safety problems you suggest.
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-05-08T20:46:55.441Z · LW(p) · GW(p)
Thanks. That did actually occur to me, but I left it out because I wasn’t sure and didn’t want to go on an exhausting chase down every possible interpretation of the paper.
Anyway, if the input to the Prosociality Score Model is a set of latent variables rather than a set of pixels then:
- My OP claim that there are two adversarial out-of-distribution generalization problems (in the absence of some creative solution not in the paper) is still true.
- One of those two problems (OOD generalization of the Prosociality Score Model) might get less bad, although I don’t see why it would go away altogether.
- …But only if the labels are correct, and the labeling problem is potentially much harder now, because the latent variables include inscrutable information about “how the AI is thinking about / conceptualizing the things that it’s seeing / doing”. I think. And if they do, then how are the humans supposed to label them as good or bad? Like, if the AI notices someone feeling physically good but psychologically distressed, we want to label it as low-energy when the AI is thinking about the former aspect and high-energy if the AI is thinking about the latter aspect, I imagine. And then we start getting into nasty neural net interpretability challenges.
Also, aren't the latent variables changing as we go, thanks to self-supervised learning? But the Intrinsic Cost Module is supposed to be immutable. I'm confused about how this is supposed to work.
Replies from: Roman Leventov↑ comment by Roman Leventov · 2023-05-09T11:40:17.366Z · LW(p) · GW(p)
But only if the labels are correct, and the labeling problem is potentially much harder now, because the latent variables include inscrutable information about “how the AI is thinking about / conceptualizing the things that it’s seeing / doing”. I think. And if they do, then how are the humans supposed to label them as good or bad? Like, if the AI notices someone feeling physically good but psychologically distressed, we want to label it as low-energy when the AI is thinking about the former aspect and high-energy if the AI is thinking about the latter aspect, I imagine. And then we start getting into nasty neural net interpretability challenges.
I believe the idea was (though this could be a false memory of my interpretation because I cannot find it in the paper now) that separate NNs would be trained to interpret world model representations (states) as human-understandable text. At the very least, this could make the brute size of the interpretability task much smaller because interpreting the internal activations and circuits of the world model or actor NNs producing these representations might not matter. This is related to Bengio's idea of separating knowledge/models from the "inference" network, where the latter could be much larger. This idea is, of course, embodied in GFlowNets, and indeed it seems to me that they could be used in place of the "world model" in the APTAMI (although LeCun doesn't like H-JEPA to be probabilistic).
However, I don't know how to bootstrap the training of these interpretability modules for representations alongside the critic, but this doesn't seem like an insurmountable engineering problem.
Also, aren't the latent variables changing as we go, thanks to self-supervised learning? But the Intrinsic Cost Module is supposed to be immutable. I'm confused about how this is supposed to work.
To me, "mutability" / online trainability of various parts of the architecture, or AI as a whole seems more like a spectrum than a binary distinction, and in fact not a very important one. You can always think of "immutable" modules as just "learning very slowly, on the level of AI engineering/training iterations", a.k.a. "model selection".
So, the "immutability" of the intrinsic cost just highlights that these things should be inferred "very slowly, with governance and caution", but you can basically configure the learning rate of other parts of the architecture, such as the world model, to also be very low, so that all the surrounding infrastructure: trainable critic modules, the "altruism controller [LW · GW]" that I proposed, interpretability modules, alignment processes and protocols, and, finally, the human understanding (i.e., "theories of AI mind" in human heads) all can "track" the changes in the world model and its representations sufficiently closely so that they don't "fall out of alignment" with them.
Actually, the fact that NNs in human brains en masse should track at least some changes in AI's world models "in time" and not fall out of alignment with them practically means that the rate of learning in the world models on the high levels of the JEPA hierarchy should be so slow that they de facto could be "immutable" on the level of a particular AI "version"/iteration, and only "learned"/updated between versions, as well as the Intrinsic Cost module. Moreover, it might need to be much slower than even the typical technology release cadence (such as "a new version of AI every 6 months"), e.g., not changing much on any 5-year interval, which seems to me the minimum realistic time in which humans en masse could adjust to a new kind of alien mind around them.
Replies from: Roman Leventov↑ comment by Roman Leventov · 2023-05-29T11:20:40.934Z · LW(p) · GW(p)
Update: I wrote a big article "Aligning an H-JEPA agent via training on the outputs of an LLM-based "exemplary actor" [LW · GW] in which I develop the thinking behind the comment above (but also update it significantly).
comment by Seth Herd · 2023-05-10T21:50:00.943Z · LW(p) · GW(p)
I agree with everything you've said here.
I think LeCun has probably ignored the alignment problem (while saying he's addressing it) not because of an intellectual oversight, but for emotional reasons.
LeCun's dismissal of alignment as a serious issue seems to me to be a polarization issue. I'm guessing he dislikes the whole topic because he feels that the people who are pushing it might slow progress in AI.
I think his beliefs are sincere, but poorly thought through. I think they're poorly thought through because he's developed and ugh field around arguments for AI risk.
I don't know exactly what LeCun's feelings are, nor am I certain this is the largest part of his reasons for taking his hardline anti-risk stance. I think it's important, though, because LeCun is the biggest name and loudest voice on that side of the discussion, and he is helping form the nucleus of a camp that is polarized against the AI safety issue. Engaging in the discussion in ways that avoid polarization is probably an important consideration.
To that end, if LeCun could actually be engaged in this discussion, that would be a big step toward preventing polarization.
comment by Ben Amitay (unicode-70) · 2023-05-09T07:44:25.292Z · LW(p) · GW(p)
Didn't read the original paper yet, but from what you describe, I don't understand how the remaining technical problem is not basically the whole of the alignment problem. My understanding of what you say is that he is vague about the values we want to give the agent - and not knowing how to specify human values is kind of the point (that, and inner alignment - which I don't see addressed either).
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-05-09T12:11:17.027Z · LW(p) · GW(p)
I don't understand how the remaining technical problem is not basically the whole of the alignment problem
Yes. I don’t think the paper constitutes any progress on the alignment problem. (No surprise, since it talks about the problem for only a couple sentences.)
Hmm, maybe you’re confused that the title refers to “an unsolved technical alignment problem” instead of “the unsolved technical alignment problem”? Well, I didn’t mean it that way. I think that solving technical alignment entails solving a different (albeit related) technical problem for each different possible way to build / train AGI. The paper is (perhaps) a possible way to build / train AGI, and therefore it has an alignment problem. That’s all I meant there.
Replies from: unicode-70↑ comment by Ben Amitay (unicode-70) · 2023-05-09T16:48:16.728Z · LW(p) · GW(p)
Yes, I think that was it; and that I did not (and still don't) understand what about that possible AGI architecture is non-trivial and has a non-trivial implementations for alignment, even if not ones that make it easier. It seem like not only the same problems carefully hidden, but the same flavor of the same problems on plain sight.
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-05-09T17:14:14.944Z · LW(p) · GW(p)
I think of my specialty as mostly “trying to solve the alignment problem for model-based RL”. (LeCun’s paper is an example of model-based RL.) I think that’s a somewhat different activity than, say, “trying to solve the alignment problem for LLMs”. Like, I read plenty of alignmentforum posts on the latter topic, and I mostly don’t find them very relevant to my work. (There are exceptions.) E.g. the waluigi effect [LW · GW] is not something that seems at all relevant to my work, but it’s extremely relevant to the LLM-alignment crowd. Conversely, for example, here’s [LW · GW] a random recent post I wrote that I believe would be utterly useless to anyone focused on trying to solve the alignment problem for LLMs.
A big difference is that I feel entitled to assume that there’s a data structure labeled “world-model”, and there’s a different data-structure labeled “value function” (a.k.a. “critic”). Maybe each of those data structures is individually a big mess of a trillion uninterpretable floating-point numbers. But it still matters that there are two data structures, and we know where each lives in memory, and we know what role each is playing, how it’s updated, etc. That changes the kinds of detailed interventions that one might consider doing. [There could be more than two data structures, that’s just an example.]
Replies from: unicode-70↑ comment by Ben Amitay (unicode-70) · 2023-05-10T13:28:46.274Z · LW(p) · GW(p)
I see. I didn't fully adapt to the fact that not all alignment is about RL.
Beside the point: I think those labels on the data structures are very confusing. Both the actor and the critic are very likely to have so specialized world models (projected from the labeled world model) and planning abilities. The values of the actor need not be the same as the output of the critic. And things value-related and planning-related may easily leak into the world model if you don't actively try to prevent it. So I suspect that we should ignore the labels and focus on architecture and training methods.
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-05-10T14:30:25.946Z · LW(p) · GW(p)
Sure, we can take some particular model-based RL algorithm (MuZero, APTAMI, the human brain algorithm, whatever), but instead of “the reward function” we call it “function #5829”, and instead of “the value function” we call it “function #6241”, etc. If you insist that I use those terms, then I would still be perfectly capable of describing step-by-step why this algorithm would try to kill us. That would be pretty annoying though. I would rather use the normal terms.
I’m not quite sure what you’re talking about (“projected from the labeled world model”??), but I guess it’s off-topic here unless it specifically applies to APTAMI.
FWIW the problems addressed in this post involve the model-based RL system trying to kill us via using its model-based RL capabilities in the way we normally expect—where the planner plans, and the critic criticizes, and the world-model models the world, etc., and the result is that the system makes and executes a plan to kill us. I consider that the obvious, central type of alignment failure mode for model-based RL, and it remains an unsolved problem.
In addition, one might ask if there are other alignment failure modes too. E.g. people sometimes bring up more exotic things like the “mesa-optimizer” thing where the world-model is secretly harboring a full-fledged planning agent, or whatever. As it happens, I think those more exotic failure modes can be effectively mitigated, and are also quite unlikely to happen in the first place, in the particular context of model-based RL systems. But that depends a lot on how the model-based RL system in question is supposed to work, in detail, and I’m not sure I want to get into that topic here, it’s kinda off-topic. I talk about it a bit in the intro here [LW · GW].
Replies from: unicode-70↑ comment by Ben Amitay (unicode-70) · 2023-05-10T15:30:04.279Z · LW(p) · GW(p)
Sorry for the off-topicness. I will not consider it rude if you stop reading here and reply with "just shut up" - but I do think that it is important:
A) I do agree that the first problem to address should probably be misalignment of the rewards to our values, and that some of the proposed problems are not likely in practice - including some versions of the planning-inside-worldmodel example.
B) I do not think that planning inside the critic or evaluating inside the actor are an example of that, because the functions that those two models are optimized to approximate reference each other explicitly in their definitions. It doesn't mean that the critic is likely to one day kill us, just that we should take it into account when we try to I do understand what is going on.
C) Specifically, it implies 2 additional non-exotic alignment failures:
- The critic itself did not converge to be a good approximation of the value function.
- The actor did not converge to be a thing that maximize the output of the critic, and it maximize something else instead.
comment by Roman Leventov · 2023-05-08T23:05:32.209Z · LW(p) · GW(p)
My comments on this post winded up into a whole separate post: "H-JEPA might be technically alignable in a modified form [LW · GW]".
comment by PeterMcCluskey · 2023-05-09T01:49:36.434Z · LW(p) · GW(p)
Why assume LeCun would use only supervised learning to create the IC module?
If I were trying to make this model work, I'd use mainly self-supervised learning that's aimed at getting the module to predict what a typical human would feel. (I'd also pray for a highly multipolar scenario if I were making this module immutable when deployed.)
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-05-09T02:05:49.637Z · LW(p) · GW(p)
If I were trying to make this model work, I'd use mainly self-supervised learning that's aimed at getting the module to predict what a typical human would feel.
I don’t follow. Can you explain in more detail? “Self-supervised learning” means training a model to predict some function / subset of the input data from a different function / subset of the input data, right? What’s the input data here, and what is the prediction target?
Replies from: PeterMcCluskey↑ comment by PeterMcCluskey · 2023-05-09T21:14:59.287Z · LW(p) · GW(p)
I haven't thought this out very carefully. I'm imagining a transformer trained both to predict text, and to predict the next frame of video.
Train it on all available videos that show realistic human body language.
Then ask the transformer to rate on a numeric scale how positively or negatively a human would feel in any particular situation.
This does not seem sufficient for a safe result, but implies that LeCun is less nutty than your model of him suggests.
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-05-09T22:52:40.770Z · LW(p) · GW(p)
Then ask the transformer to rate on a numeric scale how positively or negatively a human would feel in any particular situation.
I'm still confused. Here you're describing what you're hoping will happen at inference time. I'm asking how it's trained, such that that happens. If you have a next-frame video predictor, you can't ask it how a human would feel. You can't ask it anything at all - except "what might be the next frame of thus-and-such video?". Right?
I wonder if you've gotten thrown off by chatGPT etc. Those are NOT trained by SSL, and therefore NOT indicative of how SSL-trained models behave. They're pre-trained by SSL, but then they're fine-tuned by supervised learning, RLHF, etc. The grizzled old LLM people will tell you about the behavior of pure-SSL models, which everyone used before like a year ago. They're quite different. You cannot just ask them a question and expect them to spit out an answer. You have to prompt them in more elaborate ways.
(On a different topic, self-supervised pre-training before supervised fine-tuning is almost always better than supervised learning from random initialization, as far as I understand. Presumably if someone were following the OP protocol, which involves a supervised learning step, then they would follow all the modern best practices for supervised learning, and “start from a self-supervised-pretrained model” is part of those best practices.)
Replies from: red75prime↑ comment by red75prime · 2023-05-10T18:30:29.890Z · LW(p) · GW(p)
If you have a next-frame video predictor, you can't ask it how a human would feel. You can't ask it anything at all - except "what might be the next frame of thus-and-such video?". Right?
Not exactly. You can extract embeddings from a video predictor (activations of the next-to-last layer may do, or you can use techniques, which enhance semantic information captured in the embeddings). And then use supervised learning to train a simple classifier from an embedding to human feelings on a modest number of video/feelings pairs.
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-05-10T18:55:23.341Z · LW(p) · GW(p)
I think that’s what I said in the last paragraph of the comment you’re responding to:
(On a different topic, self-supervised pre-training before supervised fine-tuning is almost always better than supervised learning from random initialization, as far as I understand. Presumably if someone were following the OP protocol, which involves a supervised learning step, then they would follow all the modern best practices for supervised learning, and “start from a self-supervised-pretrained model” is part of those best practices.)
Maybe that’s what PeterMcCluskey was asking about this whole time—I found his comments upthread to be pretty confusing. But anyway, if that’s what we’ve been talking about all along, then yeah, sure. I don’t think my OP implied that we would do supervised learning from random initialization. I just said “use supervised learning to train an ML model”. I was assuming that people would follow all the best practices for supervised learning—self-supervised pretraining, data augmentation, you name it. This is all well-known stuff—this step is not where the hard unsolved technical problems are. I’m open to changing the wording if you think the current version is unclear.
comment by Review Bot · 2024-04-05T10:25:14.136Z · LW(p) · GW(p)
The LessWrong Review [? · GW] runs every year to select the posts that have most stood the test of time. This post is not yet eligible for review, but will be at the end of 2024. The top fifty or so posts are featured prominently on the site throughout the year.
Hopefully, the review is better than karma at judging enduring value. If we have accurate prediction markets on the review results, maybe we can have better incentives on LessWrong today. Will this post make the top fifty?
comment by [deactivated] (Yarrow Bouchard) · 2023-11-11T19:16:36.791Z · LW(p) · GW(p)
Now, it doesn’t immediately follow that the AI will actually want to start buying chair-straps and heroin, for a similar reason as why I personally am not trying to get heroin right now.
This seems important to me. What is the intrinsic cost in a human brain like mine or yours? Why don’t humans have an alignment problem (e.g. if you radically enhanced human intelligence, you wouldn’t produce a paperclip maximiser)?
Maybe the view of alignment pessimists is that the paradigmatic human brain’s intrinsic cost is intractably complex. I don’t know. I would like more clarity on this point.
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-11-12T01:34:29.394Z · LW(p) · GW(p)
The “similar reason as why I personally am not trying to get heroin right now” is “Example 2” here [LW · GW] (including the footnote), or a bit more detail in Section 9.5 here [LW · GW]. I don’t think that involves an idiosyncratic anti-heroin intrinsic cost function.
The question “What is the intrinsic cost in a human brain” is a topic in which I have a strong personal interest. See Section 2 here [LW · GW] and links therein. “Why don’t humans have an alignment problem” is sorta painting the target around the arrow I think? Anyway, if you radically enhanced human intelligence and let those super-humans invent every possible technology, I’m not too sure what you would get (assuming they don’t blow each other to smithereens). Maybe that’s OK though? Hard to say. Our distant ancestors would think that we have awfully weird lifestyles and might strenuously object to it, if they could have a say.
Maybe the view of alignment pessimists is that the paradigmatic human brain’s intrinsic cost is intractably complex.
Speaking for myself, I think the human brain’s intrinsic-cost-like-thing is probably hundreds of lines of pseudocode, or maybe low thousands, certainly not millions. (And the part that’s relevant for AGI is just a fraction of that.) Unfortunately, I also think nobody knows what those lines are. I would feel better if they did. That wouldn’t be enough to make me “optimistic” overall, but it would certainly be a step in the right direction. (Other things can go wrong too.)
Replies from: Yarrow Bouchard↑ comment by [deactivated] (Yarrow Bouchard) · 2023-11-12T01:44:34.109Z · LW(p) · GW(p)
...I think the human brain’s intrinsic-cost-like-thing is probably hundreds of lines of pseudocode, or maybe low thousands, certainly not millions. (And the part that’s relevant for AGI is just a fraction of that.) Unfortunately, I also think nobody knows what those lines are. I would feel better if they did.
So, the human brain's pseudo-intrinsic cost is not intractably complex, on your view, but difficult to extract.
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-11-12T01:57:55.578Z · LW(p) · GW(p)
I would say “the human brain’s intrinsic-cost-like-thing is difficult to figure out”. I’m not sure what you mean by “…difficult to extract”. Extract from what?
Replies from: Yarrow Bouchard↑ comment by [deactivated] (Yarrow Bouchard) · 2023-11-12T02:04:01.620Z · LW(p) · GW(p)
Extract from the brain into, say, weights in an artificial neural network, lines of code, a natural language "constitution", or something of that nature.
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-11-12T03:30:55.784Z · LW(p) · GW(p)
“Extract from the brain” how? A human brain has like 100 billion neurons and 100 trillion synapses, and they’re generally very difficult to measure, right? (I do think certain neuroscience experiments would be helpful [LW · GW].) Or do you mean something else?
Replies from: Yarrow Bouchard↑ comment by [deactivated] (Yarrow Bouchard) · 2023-11-12T04:02:16.568Z · LW(p) · GW(p)
I meant "extract" more figuratively than literally. For example, GPT-4 seems to have acquired some ability to do moral reasoning in accordance with human values. This is one way to (very indirectly) "extract" information from the human brain.
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-11-12T12:13:22.377Z · LW(p) · GW(p)
GPT-4 is different from APTAMI. I'm not aware of any method that starts with movies of humans, or human-created internet text, or whatever, and then does some kind of ML, and winds up with a plausible human brain intrinsic cost function. If you have an idea for how that could work, then I'm skeptical, but you should tell me anyway. :)
comment by MichaelStJules · 2023-05-09T04:17:29.114Z · LW(p) · GW(p)
For starters, suppose the AI straps lots of humans into beds, giving them endless morphine and heroin IV drips, and the humans get into such a state of delirium that they repeatedly praise and thank the AI for continuing to keep the heroin drip turned on.
This dystopian situation would be, to the AI, absolute ecstasy—much like the heroin to those poor humans.
This seems to require some pretty important normative claims that seem controversial in EA and the rationality community. Based on your description, it seems like the humans come to approve of this (desire/prefer this) more than they approved of their lives before (or we could imagine similar scenarios where this is the case), and gain more pleasure from it, and you could have their approval (by assumption) outweigh the violation of the preferences for this not to happen. So, if you're a welfarist consequentialist and a hedonist or a desire/preference theorist, and unless an individual's future preferences count much less, this just seems better for those humans than what normal life has been like lately.
Some ways out seem to be:
- Maybe certain preference-affecting views, or discounting future preferences, or antifrustrationism (basically negative preference utilitarianism), or something in these directions
- Counting preferences more or less based on their specific contents, e.g. wanting to take heroin is a preference that counts less in your calculus
- Non-hedonist and non-preferential/desire-based welfare (possibly in addition to hedonistic and preferential/desire-based welfare), e.g. objective goods/bads
- Non-welfarist consequentialist values, i.e. valuing outcomes for reasons other than how they matter to individuals' welfare
- Non-consequentialism, e.g. constraints on violating preferences or consent, or not getting affirmative consent
- Actually, whatever preferences they had before and were violated were stronger than the ones they have now and are satisfied
- Actually, we should think much bigger; maybe we should optimize with artificial consciousness instead and do that a lot more.
If it's something like 1 or 5, it should instead (or also?) model what the humans already want, and try to get that to happen.
Replies from: steve2152, Roman Leventov↑ comment by Steven Byrnes (steve2152) · 2023-05-09T12:22:30.214Z · LW(p) · GW(p)
Let’s please not have an object-level debate of hedonic utilitarianism (or whatever) here. It’s very off-topic.
I personally am strongly against strapping humans into chairs on heroin drips. If anyone reading this is in favor of the heroin-drip thing (which seems unlikely to me but what do I know?), then bad news for them is that there’s no strong reason to expect that from APTAMI either.
My discussion there in OP was not a prediction of what APTAMI will lead to, it was an illustrative example of one of a near-infinite number of weird edge cases in which its classifiers would give undesired results. In particular, I think hedonic utilitarians would also sorely regret turning on an APTAMI system as described. There is no moral philosophy that anyone subscribes to, such that they would have a strong reason to believe that turning on APTAMI would not be a catastrophic mistake by their own lights.
Replies from: MichaelStJules↑ comment by MichaelStJules · 2023-05-09T17:50:16.800Z · LW(p) · GW(p)
I think your scenario only illustrates a problem with outer alignment (picking the right objective function), and I think it's possible to state an objective, that if it could be implemented sufficiently accurately and we could guarantee the AI followed it (inner alignment), would not result in a dystopia like this. If you think the model would do well at inner alignment if we fixed the problems with outer alignment, then it seems like a very promising direction and this would be worth pointing out and emphasizing.
I think the right direction is modelling how humans now (at the time before taking the action), without coercion or manipulation, would judge the future outcome if properly informed about its contents, especially how humans and other moral patients are affected (including what happened along the way, e.g. violations of consent and killing). I don't think you need the coherency of coherent extrapolated volition, because you can still capture people finding this future substantially worse than some possible futures, including the ones where the AI doesn't intervene, by some important lights, and just set a difference-making ambiguity averse objective. Or, maybe require it not to do substantially worse by any important light, if that's feasible: we would allow the model to flexibly represent the lights by which humans judge outcomes where doing badly in one means doing badly overall. Then it would be incentivized to focus on acts that seem robustly better to humans.
I think an AI that actually followed such an objective properly would not, by the lights of whichever humans whose judgements it's predicting, increase the risk of dystopia through its actions (although building it may be s-risky, in case of risks of minimization). Maybe it would cause us to slow moral progress and lock in the status quo, though. If the AI is smart enough, it can understand "how humans now (at the time before taking the action), without coercion or manipulation, would judge the future outcome if properly informed about its contents", but it can still be hard to point the AI at that even if it did understand it.
Another approach I can imagine is to split up the rewards into periods, discount them temporally, check for approval and disapproval signals in each period, and make it very costly relative to anything else to miss one approval or receive a disapproval. I describe this more here [EA(p) · GW(p)] and here [LW · GW]. As JBlack pointed out in the comments of the second post, there's incentive to hack the signal. However, as long as attempts to do so are risky enough by the lights of the AI and the AI is sufficiently averse to losing approval or getting disapproval and the risk of either is high enough, it wouldn't do it. And of course, there's still the problem of inner alignment; maybe it doesn't even end up caring about approval/disapproval in the way our objective says it should out of distribution.
Replies from: steve2152↑ comment by Steven Byrnes (steve2152) · 2023-05-09T23:32:22.102Z · LW(p) · GW(p)
I’m really making two claims in this post:
- First, that the vague proposal for Intrinsic Cost in APTAMI will almost definitely lead to AIs that want to kill us.
- Second, that nobody has a better proposal for Intrinsic Cost that’s good enough that we would have a strong reason to believe that the AI won’t want to kill us.
Somewhere in between those two claims is a question of whether it’s possible to edit the APTAMI proposal so that it’s less bad—even if it doesn’t meet the higher bar of “strong reason to believe it won’t won’t want to kill us”. My answer is “absolutely yes”. The APTAMI proposal is so bad that I find it quite easy to think of ways to make it less bad. The thing you mentioned (i.e. that “when perceiving joy in nearby humans” is a poorly-thought-through phrase and we can do better) is indeed one example.
My main research topic is (more-or-less) how to write an Innate Cost module, sometimes directly and sometimes indirectly. I don’t currently have any plan that passes the bar of “strong reason to believe the AI won’t want to kill us”. I do have proposals that seem to pass the much lower bar of “it seems at least possible that the AI won’t want to kill us”—see here [LW · GW] for a self-contained example. The inner alignment problem is definitely relevant.
↑ comment by Roman Leventov · 2023-05-09T08:26:02.163Z · LW(p) · GW(p)
I believe Steven didn't imply that a significant number of people would approve or want such a future -- indeed, the opposite, hence he called the scenario "dystopian".
He basically meant that optimising surface signals of pleasure does not automatically lead to behaviours and plans congruent with reasonable ethics, so the surface elements of alignment suggested by LeCun in the paper are clearly insufficient.
Replies from: MichaelStJules↑ comment by MichaelStJules · 2023-05-09T08:43:36.153Z · LW(p) · GW(p)
I think many EAs/rationalists shouldn't find this to be worse for humans than life today on the views they apparently endorse, because each human looks better off under standard approaches to intrapersonal aggregation: they get more pleasure, less suffering, more preference satisfaction (or we can imagine some kind of manipulation to achieve this), but at the cost of some important frustrated preferences.
Replies from: rotatingpaguro↑ comment by rotatingpaguro · 2023-05-09T11:30:08.389Z · LW(p) · GW(p)
EA/rationalists seems to me the community who gives more conscious attention to the problem of following your officially stated preferences down a cliff, a.k.a. Goodhart [? · GW].
Replies from: MichaelStJules↑ comment by MichaelStJules · 2023-05-09T17:54:18.880Z · LW(p) · GW(p)
FWIW, I'm not sure if that's true relative to the average person, and I'd guess non-consequentialist philosophers are more averse to biting bullets than the average EA and maybe rationalist.
Replies from: rotatingpaguro↑ comment by rotatingpaguro · 2023-05-09T19:40:15.739Z · LW(p) · GW(p)
I suspect that you read "conscious attention to the problem" in a different light than what I mean. To clarify:
Average person won't go down a cliff on literal instructions, unless Moloch? Yes.
Average person will identify and understand such problem? No.
EA bites a bullet and does something weird? Yes.
EA bites a bullet because YAY BULLETS COOL? No.